英语原文共 11 页
摘要
超载的卡车,包括一些特别的重型卡车,经常会对桥梁造成严重威胁,例如桥梁损坏,疲劳破坏甚至倒塌。与设计规范中的标准交通设计载荷相比,超载卡车的实际特性,例如卡车重量和类型,很难预测或定义。这些特征并不仅限于该位置。相反,它们依赖于经济,法规和执法,并且由于给定位置的不确定性而随时间变化。在当前的研究中,对长期交通监控数据进行了统计研究,以确定超重型卡车的关键特性,例如车辆类型,车道分布,车速,轴重,车轴距离以及流量随时间的变化。来自交通监控数据的所有卡车都被分类为17种典型的车辆类型,其中从交通监控数据中总共提取了1319个额外的重型卡车情景。为了研究超重型卡车下的桥梁性能,开发了先进的桥梁/交通互动分析软件,并用于分析选定的交通情景。典型的中跨公路桥梁的桥梁响应和动态放大系数(DAFs)在数值上得到了研究。最后,将这些DAF和桥接响应与AASHTO LRFD桥接设计规范和中文代码中指定的那些进行比较。DOI:10.1061 /(ASCE)BE.1943-5592.0000666。 copy;2014美国土木工程师学会。
关键词:桥梁;重型卡车;桥梁/交通互动;荷载测试;动态放大系数。
绪论
超载的卡车,包括一些额外的重型卡车,经常会对桥梁造成严重的安全威胁。 在中国,包括一些新建桥梁在内的一些桥梁倒塌事故归因于超载卡车的通过。 与规格中的标准交通设计载荷相比,超载卡车的实际特性,例如卡车重量和类型,很难预测或定义。这些特征不仅与经济,法规和执法相关,而且即使在同一地点也会随着时间的推移而变化(Chou 1996; Zhou 2007;Fu and You 2009;OBrien et al. 2009)。 因此,重要的是要研究过载卡车的特性及其对通常根据标准设计交通负荷设计的桥梁的实际影响。
已经有许多研究人员研究过桥梁性能受到交通负荷影响。 大多数这些研究是通过动态模拟或实际桥梁响应的现场测量来进行的(e.g., Calccedil;ada et al. 2005; Kim et al. 2005; OBrien et al. 2010; Chen and Wu 2010)。在大多数先前的研究中,交通流通常通过数值模型模拟,如Monte Carlo过程(Nowak 1993;Moses 2001)和细胞自动机方法(Chen and Wu 2010)或从记录的动态称重(WIM)数据中提取(Chou 1996;Fu and You 2009;Obrien et al. 2010; Guo et. 2012)。交通流模拟技术通常可以合理地模拟正常的交通流量,并对车辆成分,类型和重量进行合理假设,并且通常使用基于WIM数据或规格的局部交通统计数据(例如:Crespo-Minguilloacute;n and Casas 1997;Chen and Wu 2010)。超重型卡车通常具有更大的尺寸,重量(ge;80t),和独特的运动特征,例如与其他类型的车辆相比较低的速度。因此,涉及超重型卡车的交通流具有一些独特的特征,这些特征并未在规范中规定的一般车型或设计车辆中涵盖(例如:Zhou 2007;Fu and You 2009;Obrien et al.2010)。因此,在没有进行现场特定分析的情况下,基本的交通特征,例如车辆类型,重量和超载卡车的分布,通常很难合理地假设。Mei等人(2004年)对一条中国高速公路进行了调查,这条高速公路上有大量超载的卡车交通。记录持续时间可能不够长,因此在研究案例中发现了少量80吨以上的超重型卡车。因为Mei等人(2004)主要关注静态车辆载荷,仅分析了总重量的分布。需要进一步研究与动态相互作用有关的其他参数,例如车轴数,车轴间距和速度。在引入超重型或超载卡车的任何一般定义之前,根据所考虑的桥梁上的实际交通数据来表征超载卡车仍然是最合理的选择。虽然桥接响应监测在直接提供受特定交通负荷影响的实际桥梁性能信息时非常有用,但它也有局限性,即在监测桥梁之后,很少有关于桥梁性能的信息可用。由于相关的高昂安装和维护成本,通常只能在一定时间内在几个选定的桥上安装WIM和实时交通监控系统。在具有延长持续时间的区域中的所有桥上应用实时监测技术几乎是成本过高的。
该研究报告了最近利用与现场监测和数值模拟相关的优势,在超载超重型卡车(ge;80t)下进行桥梁性能评估的最新努力。超重型卡车的特点来自中国桥梁的长期实时交通和桥梁监控数据。基于从监测数据中提取的数千个超重型卡车情景,在典型的中跨公路桥梁上采用内部先进的动态桥梁/交通相互作用模型,对超重型卡车下的桥梁性能进行了全面的仿真分析。研究了由实际记录的超重型卡车情景引起的动态放大因子(DAFs),并进行了卡方检验,以检查在相同路面条件下DAFs在所考虑的所有五种路面条件下的分布。将基于计算值对应于各种置信水平的DAFs与AASHTO(2012)规范和中国规范[Ministry of Communications and Transportation (MOCAT) 2004]指定的值进行比较。最后,将超重型卡车排的桥梁动态响应与AASHTO LRFD桥梁规范(AASHTO 2012)和中国设计规范(MOCAT 2004)中规定的设计载荷进行了比较。
第1章 实时监控超重型卡车的特点
1.1交通监控系统
该交通监测点位于中国的宣大高速公路,这是从中国中部到中国东北部的山西省出口煤炭的主要公路连接。 因此,这条高速公路上超重卡车的数量是实质性的,特别是在山西的出境方向。自动运输信息处理系统(ATIPS)在进行实时交通调查时使用手动监控。 监视每个经过的车辆的时不变信息(例如,车辆类型和车辆重量)和时变信息(例如,车辆速度和行驶车道)。 随后将介绍实施细节。
1.1.1监测仪器
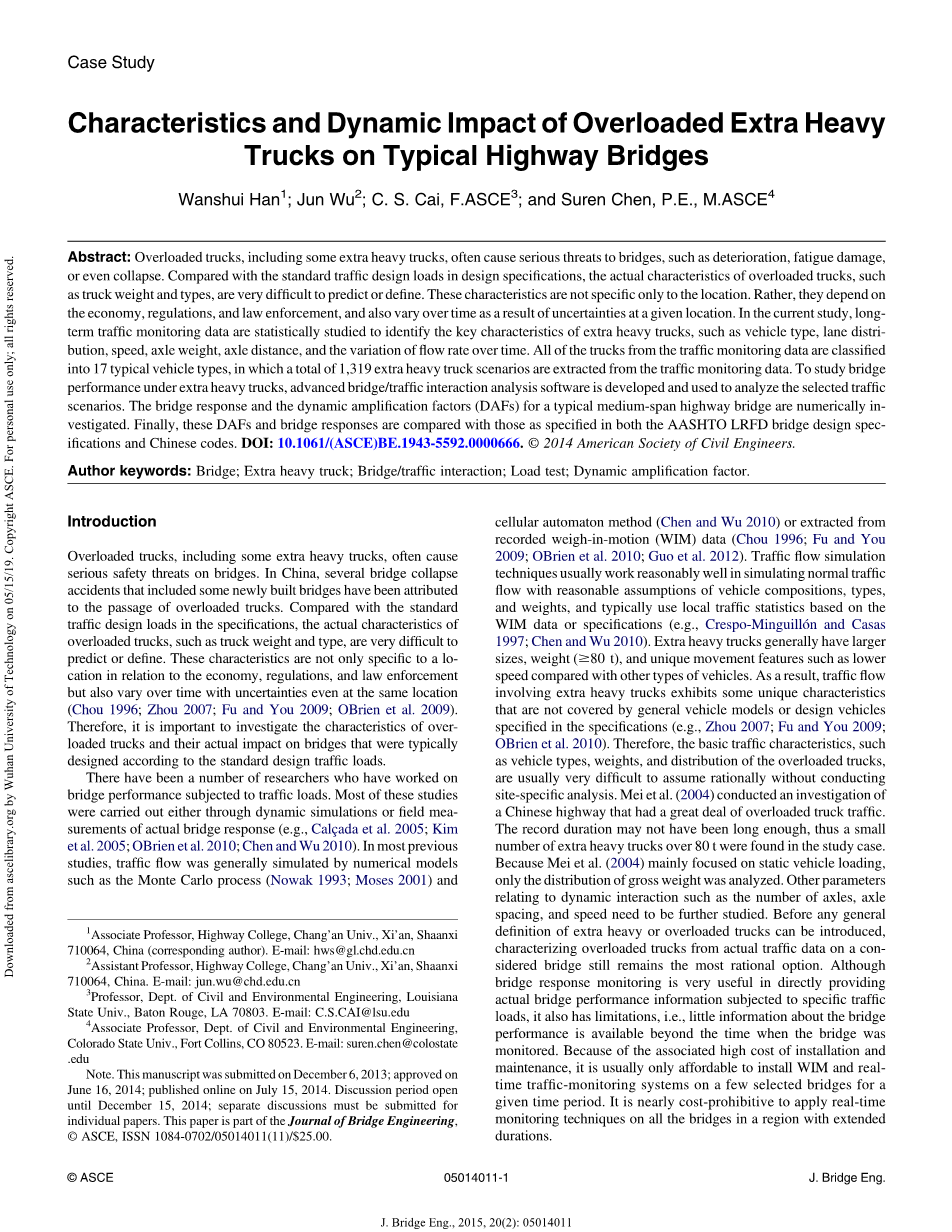
ATIPS包括WIM,自动录像机(AVR)和图像处理技术。 WIM和AVR都安装在桥的入口处。 由于实际车辆载荷的复杂构造,WIM有时会产生错误的识别。 因此,安装AVR作为辅助手段来覆盖从WIM获得的不准确性。 智能发光二极管灯[图1(a)]以确保AVR在黑暗中运行良好。 一旦通过的车辆被录像机捕获,图像处理技术[图1(b)]来准确识别车辆类型和进入车道。
1.1.2数据采集和处理
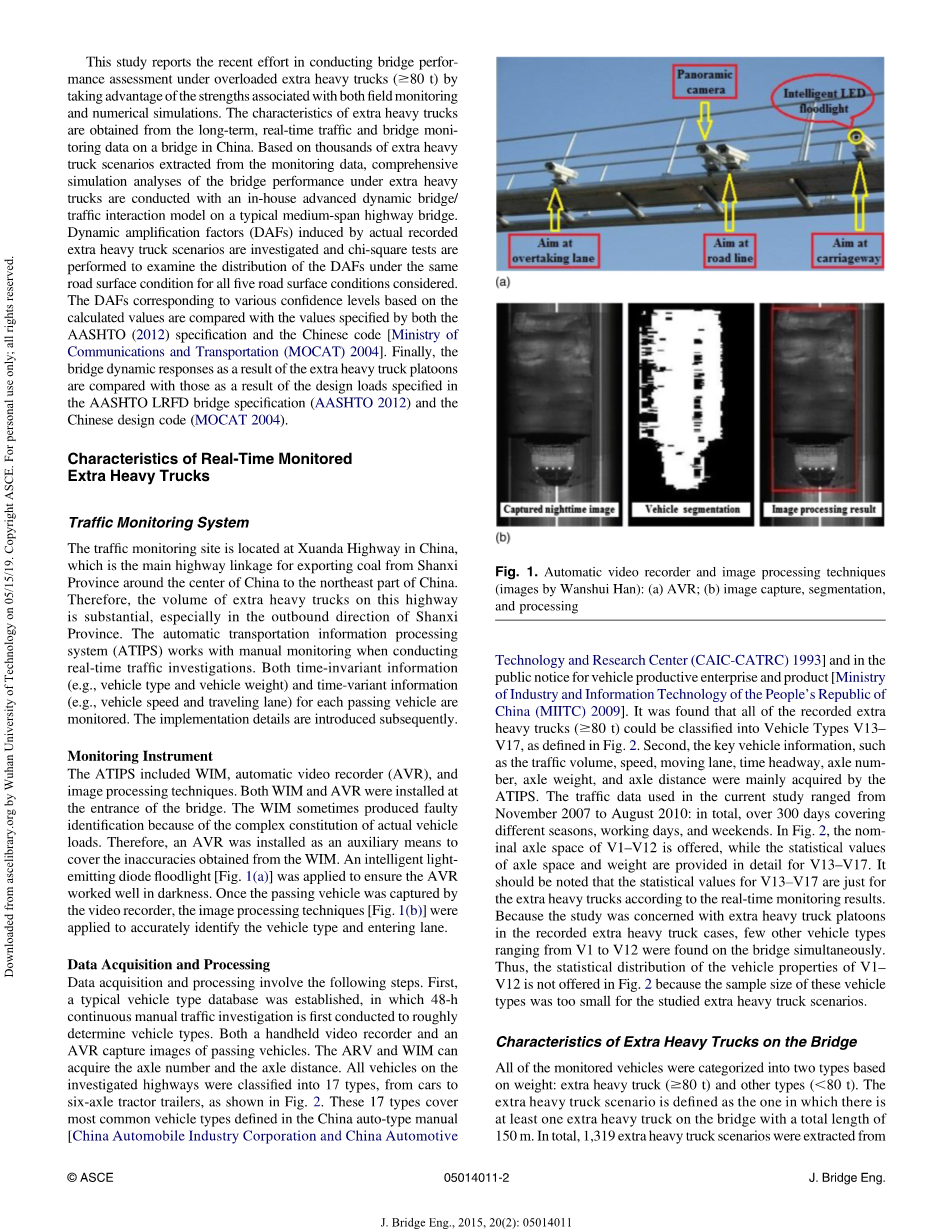
数据采集和处理涉及以下步骤。 首先,建立了典型的车辆类型数据库,其中首先进行48小时连续手动交通调查以粗略确定车辆类型。 手持录像机和AVR都可以捕捉过往车辆的图像。 ARV和WIM可以获取轴数和轴距。 调查高速公路上的所有车辆分为17种类型,从汽车到六轴拖拉机拖车,如图2所示。这17种类型涵盖了中国汽车工业手册[中国汽车工业总公司和中国汽车工业公司。中国技术研究中心(CAIC-CATRC)1993] 以及汽车生产企业和产品的公告[中华民国工业和信息化部(MIITC)2009]。结果发现,所有记录的超重型卡车(80美元)都可以分类为车型V13-V17,如图2所示。其次,关键的车辆信息,如交通量,速度,行车道,时间间隔,车轴数,车轴重量和车轴距离主要由ATIPS获得。本研究中使用的交通数据范围从2007年11月到2010年8月:总共超过300天,涵盖不同的季节,工作日和周末。在图2中,提供了V1-V12的标称轴空间,而V13-V17则详细提供了轴空间和重量的统计值。应该注意的是,根据实时监测结果,V13-V17的统计值仅适用于超重型卡车。由于该研究涉及记录的超重型卡车箱中的超重型卡车排,因此在桥上同时发现少量其他类型从V1到V12的车型。因此,图2中未提供V1-V12的车辆特性的统计分布,因为这些车辆类型的样本尺寸对于所研究的超重型卡车情况而言太小。
(a) (b)
图1 自动录像机和图像处理技术(Wanshui Han的图像):(a)AVR;(b)图像捕获,分割和处理。
1.2桥上超重型卡车的特点
所有受监控的车辆根据重量分为两种类型:超重型卡车(80美元)和其他类型(80吨)。 超重型卡车的情况定义为桥上至少有一辆额外的重型卡车,总长度为150米。 总共从实时交通调查中提取了1319个额外的重型卡车情景。 为了保证采集数据的正确性,每个额外的重型卡车情况都要手动检查和校准。 当来自WIM的数据可疑时,AVR记录的视频数据进一步用于确定车辆信息。 研究了记录的超重型卡车情景的特征,以获得与交通对桥梁的影响密切相关的重要信息,如下所述。
图2 车辆分类(V1-V12,Di=Vi的轴距离;V13-V17,和=平均值和分别对应于Vi第j轴重量的SD,特别的,和分别对应于Vi的第j轴距离的平均值和SD; 在桥/交通交互,测量的轴重和与交通监控系统的距离均用于从V1到V17的所有车型)。
1.2.1代表性超重的发生率
1.2.1.1卡车情景
根据桥上同时超重型卡车的数量,所有超重型卡车场景都分为三个典型案例。 案例1代表了交通情况,其中只有一辆额外的重型卡车和其他车辆类型可能同时在桥上。 案例1的发生率高达1285,占总数的97%。案例2表示在桥上的交通流中同时发现两辆超重型卡车的情况。 案例2的发生次数低至33次。案例3代表交通情况,其中桥上有三辆额外的重型卡车,仅发生一次。
超重型卡车的车型组成WIM和AVR都可以识别车辆类型,并且可以相互检查其结果。 在这项研究中,1,319辆额外的重型卡车场景中共发现1,354辆超重型卡车,其中V16和V17的数量分别为839和486。 V13,V14和V15的数量相对较小。 每种车型对所有超重型卡车的百分比如图3(a)所示,可以很容易地看出,主要的超重型卡车类型是六轴拖拉机拖车(V16和V17),占97.86% 记录的所有超重型卡车。其余2.13%的车辆是五轴拖拉机拖车(V13,V14和V15),如图2所示。
图3 超重型卡车排的特点:(a)超重型卡车的类型分布; (b)轴重分布; (c)GVW分发;(d)车轴距离分布; (e)车道分布; (f)速度分配; (g)流量变化
1.2.1.2卡车重量
所有超重型卡车都落入了车型V13-V17,如图2所示。对于从V13到V17的超重型卡车,轴重的统计平均值和SD如图2所示。 图3(b)中显示的重量分布表明它服从三峰分布。 前两个峰值对应于拖车的轴重量,而第三个峰值对应于拖拉机。 超重型卡车的车辆总重量(GVW)分布如图3(c)所示。 据观察,超重型卡车总重量的80%在80至130吨之间,并且发生频率随着卡车重量的减少而增加。 由于中国一级公路的重量限制仅为55吨,因此在宣大高速公路上出现卡车超载现象,这可能对桥梁的适用性和安全性构成更大的威胁。
1.2.1.3车轴距离
轴距是另一个重要参数,轴重和轴数会影响桥梁的动态响应。 所有超重型卡车(V13-V17)轴距的平均值和标准差如图2所示。轴距的直方图遵循多峰分布,如图3(d)所示,其中区域以 7.1米对应最长的轴距,其他三个峰分别对准1.3,2.5和3.1米。
1.2.1.4交通线路分布
在所研究的桥上,每个方向有两条车道。 车道1和4是车道,而车道2和3是超车车道。 超重型卡车的车道分布如图3(e)所示,可以观察到超重型卡车主要使用车道; 然而,在超车道上很少发现超重型卡车,因为它们通常以较慢的速度移动。 此外,在4号车道上发现了更多的超重型卡车,包括满载或甚至超载的卡车,而不是在1号车道,因为4号车道是用于出口煤炭的主要路线。
1.2.1.5卡车速度
ATIPS可以记录车辆通过WIM仪器时的平均速度。 如图3(f)所示,大约94%的超重型卡车的速度小于60公里/小时,而中国大多数公路的速度限制为大型卡车的120或100公里= h。 还发现大约70%的超重型卡车以10至40km = h的速度移动。 因此,记录的大多数超重型卡车以相当慢的速度穿过桥梁,这在后续评估其对桥梁的动态影响时被考虑。
1.2.1.6超重型卡车的流量
一天内超重型卡车的每小时发生变化如图3(g)所示,其中发现85和约100辆车的两个峰值分别发生在凌晨1点和晚上8点。 白天从早上6点到下午6点的额外重型卡车的流量。 是近40辆车= h,大约60辆车=午夜时分。 因此,更多的超重型卡车在夜间通过桥梁而不是白天。
第2 章 桥梁/交通相互作用的数值模型
在确定超重型卡车的实际交通情景后,这些情景在桥梁/交通动态模拟软件中得到了重复,以预测桥梁响应。 桥梁/交通相互作用的基本理论背景和模拟工具将在后续章节中介绍。
2.1桥梁/交通互动分析模型
在桥梁/交通相互作用中,使用FEM建立了桥梁结构的分析模型。 在开发的FEM软件中主要使用两种元件类型:(1)用于模拟桥面板,塔架和桥墩的三维脊梁;(2)桁架单元造型电缆和钢桁架构件。 开发的软件可以在单梁或格架模型中模拟桥梁。 两种模型类型的轮胎 - 路面接触点处的位移由各种插值方法确定(Han 2006)。 单梁桥模型通常用于具有箱形横截面的大跨度桥梁,并且格栅方法更适合于由若干I形或T形截面组成的横截面。
在目前的研究中,车辆采用质量阻尼弹簧系统(Cai and Chen 2004)建模,如大多数研究中所使用的那样。为了覆盖图2所示的
资料编号:[3375]

