英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
形状记忆合金在土木结构中的应用
G. Songa,lowast;, N. Maa, H.-N. Lib
a休斯敦大学机械工程系,休斯敦,TX 77204,美国
b大连理工大学土木与水利工程学院,大连,116024,中国
于2004年6月24日收到; 修订后于2005年12月19日收到;于2005年12月26日接受可于2006年4月17日在网上索龋
摘要
形状记忆合金是一种新型的功能材料,在许多领域得到了越来越广泛的应用。最近,研究工作已经开始扩展到使用SMA控制土木结构。本文综述了SMA材料在土木结构的被动、主动及半主动控制领域的应用。首先,概述了SMA的两个主要性质,形状记忆效应(SME)和超弹性。这两个主要性质和温度或应力诱导的可逆的滞回的奥氏体与马氏体之间的相变有关。这些独特的性能使SMA可以作为驱动器、无源能量耗散器和民用结构控制用阻尼器。本文综述了基于SMA器件的土木结构被动、半主动或主动控制研究现状。本文还介绍了这些SMA的工作原理、设计和实验结果。c 2006爱思唯尔有限公司保留所有权利。
关键词:形状记忆合金;结构控制;被动减振;结构改造
1.引言
民用建筑智能系统是指能够针对外部干扰和/或意外的严重荷载,自动调整结构特性,以保证结构安全、延长结构使用寿命和使用能力的系统[26]。实现这一目标的一项关键技术是开发和应用智能材料,这种材料可以集成到结构中,使结构具有诸如传感、驱动和信息处理等功能,这些功能对于结构的监测、自适应和自恢复至关重要。智能材料的例子包括有压电陶瓷、形状记忆合金(SMAs)、磁流变(MR)流体和电流变(ER)液体。
SMAs以其高功率密度、固态驱动、高阻尼能力、耐久性和抗疲劳性等优点在许多领域得到了应用。当与民用结构结合时,SMAs可以是被动的、半主动的或主动的组件,以减少环境或地震造成结构损伤。尽管SMAs在土木结构中的应用研究大多仍处于实验室阶段,其中一些已经在现场得到了应用,并且是有效的[17]。
2. 镍钛合金形状记忆合金的基本知识
2.1.形状记忆合金的基本知识
1932年,Chang和Read在金镉(AuCd)中观察到一个可逆相变,这是关于形状记忆转化的第一个记录。1962年后,Buechler和他的同事在海军军工实验室发现了镍钛(他们将这种材料命名为镍钛合金,以他们的工作场所命名)的形状记忆效应(SME),形状记忆合金的深入研究和实际应用都应运而生。
迄今为止,已经发现了许多类型的形状记忆合金。其中,镍钛合金具有优越的热力学和热电性能,是最常用的SMA[12]。在本文中,SMAs被称为镍钛合金SMAs,这种SMA是确定的,除非另有一种类型的SMAs。本文综述了镍钛诺SMAs的两个重要性质:形状记忆效应和超弹性。
2.2.形状记忆效应和超弹性
镍钛合金具有两种独特的性能:SME和超弹性。SME指的是SMA在受热后回复到预定形状的现象。超弹性是指SMAs在卸载[12]后会发生大量的非弹性变形并恢复其形状的现象。这些独特的性质是SMAs可逆相变的结果。SMAs中有两种晶体相:较强的奥氏体相,高温稳定,马氏体较弱相,低温稳定。这两个阶段不同在它们的晶体结构中。奥氏体以身体为中心立方晶体结构,而马氏体为平行四边形结构(不对称),最多有24种变体。当马氏体中的SMAs受到外界应力时,它们通过所谓的脱缠绕机制变形将不同的马氏体变体转换为特定的马氏体变体可适应最大伸长的变化。由于在其平行四边形结构中,马氏体相是最弱的和容易变形的。相反,奥氏体相只有一种可能的方向,表现的比较强抗外界应力[12]。
2.3.相变和相关的能量耗散
SMA的组成取决于其内部的能级。对于给定的温度,晶体结构需要适应最小的能量状态。在外力的驱动下,两种晶体相可以发生相变:马氏体相变和其逆相变。相变的驱动力是两相的由温度梯度或机械载荷提供的吉布斯自由能。从热力学的角度来看,温度和外部应力在转化机理中起着等效的作用。因此,有两种马氏体转变:引起SME的温度诱导转变和导致超弹性的应力诱导转变。
图1为温度激励循环下典型的无应力温度诱导马氏体相变及其逆相变。四个转变温度描述转换回路:马氏体起始温度(Ms),马氏体结束温度(Mf),奥氏体开始温度(As)和奥氏体结束温度(A f)。这些临界温度确定了正马氏体(马氏体)和逆变换的开始和结束。值得注意的是,由于内相摩擦,温度-变形环是滞后的。
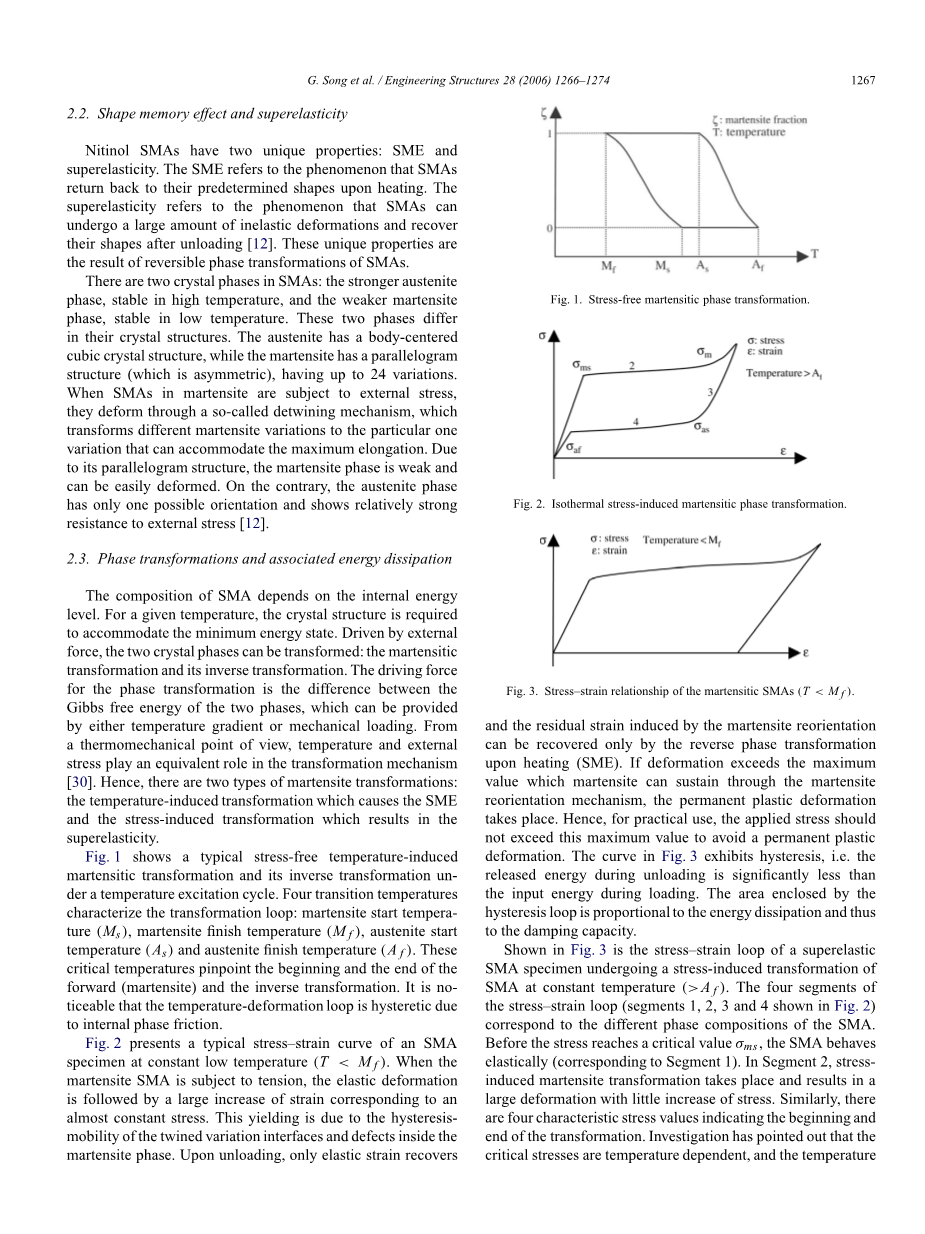
图2为SMA试件在恒定低温(T lt; Mf)下的典型应力应变曲线。当马氏体SMA受拉时,弹性变形后应变大幅增加,应力几乎恒定。这种屈服是由于马氏体相中缠绕变化界面的滞后性和缺陷所致。卸载后仅恢复弹性应变,而马氏体重定向引起的残余应变只能通过在加热(SME)反向相变恢复。如果变形超过马氏体通过马氏体重定向机构所能承受的最大值,就会发生永久塑性变形。因此,在实际应用中,施加的应力不应超过这个最大值,以避免永久塑性变形。图2中的曲线呈现滞后现象,即卸载时释放的能量明显小于加载时的输入能量。磁滞回线围成的面积与能量耗散成正比,从而与阻尼能力成正比。
图3为超弹性材料的应力-应变回路SMA试件经历应力诱导的转变常温下的SMA (gt;A f)。应力-应变环的4段(图2所示的1、2、3、4段)对应SMA的不同相组成。压力达到一个临界值sigma;ms之前,SMA表现弹性(对应段1)。在第2段中,应力马氏体发生了马氏体变形,变形量很大,应力增加很少。类似地,有四个特征应力值指示转换的开始和结束。研究指出,临界应力与温度有关,卸载过程的温度决定了残余应变[12]。由于存在应力-应变滞后现象,故认为加载和卸载的应力差,环路围成的面积表示在装卸循环过程中消耗的能量。
图1无应力马氏体相变 图2等温应力诱导马氏体相变
图3马氏体SMAs的应力-应变关系(T lt; Mf)
3.SMAs阻尼特性的研究
采用SMAs进行被动结构控制依赖于SMA的阻尼能力,代表了它在动态荷载作用下耗散结构振动能量的能力。正如上一节所述,阻尼能力来自两种机制:表现出SME的马氏体变化重定向和表现出超弹性的奥氏体相中应力诱导的马氏体相变。
广泛使用的镍钛合金超弹性材料的能量耗散对SMA导线进行了研究[9,28,18,14]。Dolce和Cardone[10]对拉伸加载下的超弹性镍钛诺丝进行了研究。他们观察到阻尼能力与温度、加载频率和加载循环次数的关系。结果表明,在一定的抗震应用范围内,SMA丝的力学性能是稳定的。此外,他们还建议对奥氏体线进行预拉,以获得更大的能量耗散效果。Piedboeuf和Gauvin[28]报道了环境温度对超弹性镍钛合金线阻尼能力的影响可以忽略不计。Gandhi和Wolons[14]提出用复模量法表征超弹性SMA线的阻尼能力,方便与结构动力学积分。超弹性SMA线不仅在受拉载荷作用下具有阻尼能力,而且在循环弯曲作用下也具有阻尼能力。2000年,Ip提出了纯弯曲载荷作用下SMA线能量耗散的预测方法。数值结果表明,超弹性SMA线耗散的能量对其直径高度敏感;其中SMA线越粗,消耗的能量越大。
近年来,随着大截面SMAs的出现,SMA棒材或棒材性能的研究越来越受到关注[22,9]。Liu等人发现。随着应变幅值的增大,马氏体镍钛合金棒材的阻尼能力逐渐增大,但随着加载周期的增加,阻尼能力逐渐减小,达到一个稳定的最小值。Dolce和Cardone[10]比较了镍钛合金棒材在扭转作用下的马氏体阻尼和奥氏体阻尼。他们发现马氏体镍钛合金棒材的阻尼能力比奥氏体镍钛合金棒材的阻尼能力大很多,尽管随着残余应变的累积,先验不能保持在其最大值。他们还注意到马氏体棒材的力学行为与加载频率无关,奥氏体棒材的力学行为与加载频率略有关系。这说明马氏体和奥氏体镍钛诺棒均能在较宽的频率范围内工作,具有良好的抗震性能。综述了马氏体SMAs的阻尼能力。
4. SMAs在土木结构控制中的应用
4.1.SMAs在土木结构控制中的应用分类
采用主动控制、半主动控制和被动控制可以实现土建结构对外部动力荷载的振动抑制。在主动控制模式下,外部电源控制执行器对目标结构施加力。对于被动控制系统,不需要外部电源,并且可以根据结构的运动产生冲击力。与主动控制装置相比,半主动控制装置在结构性能调整上消耗的能量要少得多。基于此分类方法,目前SMAs在结构控制中的应用可分为被动结构控制、主动频率调谐(半主动)和主动损伤控制三类。
4.2.用于被动结构控制的SMAs
4.2.1.SMAs的被动结构控制分类
采用SMAs的被动结构控制利用SMA的阻尼特性,减少结构在严重荷载作用下的响应和随之产生的塑性变形。SMAs可以通过两种机制有效地用于这一目的:地面隔离系统和能量耗散系统[30]。在地面隔震系统中,安装在上部结构与地面之间的SMAmade隔震器将地面运动传递给上部结构的地震能量进行过滤,使上部结构的损伤得到衰减。另一方面,通过耗能机理,将马氏体或奥氏体SMA元件集成到结构中,根据滞回应力应变关系吸收振动能量。
虽然这两种机制是基于SMAs的阻尼能力,但它们在布置和功能上是不同的。SMA隔离器根据激励水平为结构提供可变刚度,并在卸载后进行能量耗散和恢复。因此,超弹性SMAs适用于隔振器。另一方面,SMA耗能元件主要是通过耗能来减小结构的动力响应。在此情况下,对马氏体和超弹性SMAs都进行了研究。
一般而言,对于用于被动振动控制的SMA器件,马氏体SMAs具有较大的阻尼能力;然而,它需要外部热量引起相变以恢复其原始形状。另一方面,超弹性SMAs的阻尼能力较小,但具有较强的再定心力来恢复结构的初始位置,且超弹性SMAs的残余应变较小。
4.2.2.SMA隔离设备
所述SMA隔离系统包括用于公路桥梁SMA棒[37]、适用于民用建筑的SMA线对中装置[8]、SMA弹簧隔离系统[19,24]和多自由度剪力框架结构的SMA肌腱隔离系统[4]。
王尔德等人[37]研究了一种用于高架桥的超弹性SMA筋基础隔震系统。SMA 棒隔离系统如图4所示。对SMA隔离系统和常规隔离系统在三个激励水平下进行了对比仿真。结果表明,SMA隔离系统对激励的响应是可变的,并且具有显著的阻尼。对于较小的激励水平,SMA隔离系统将桥墩与桥面牢牢地连接在一起,而在常规系统中相对运动出现。对于中等激励水平,SMA杆经历应力诱导的马氏体转变,因此软刚度允许相对位移可与传统隔离系统相媲美。在高荷载作用下,SMA杆进入马氏体弹性范围,最大位移为传统隔震系统的五分之一。结果表明,采用SMA隔离系统的桥梁的损伤能量要小于常规系统。
Dolce等人[8]在MANSIDE(新型隔震和耗能器件记忆合金)项目中开发并测试了基于镍钛合金的全尺寸隔震系统,以研究镍钛合金导线用于隔振的可行性。其工作原理如图5所示。将一根超弹性SMA线缠绕在三根与管相连的短棒上,当上部结构与基础之间发生往复运动时,钢丝被拉长,振动幅度被钢丝阻尼。该隔离系统最大可承受600kn的力,最大位移可达180mm。循环加载试验表明,该隔振系统具有随加载强度变化的刚度,并具有较高的滤波能量传输效率。他们测试了隔离系统,以控制一个140毫米初始位移的实际基础隔震建筑的自由振动。试验充分验证了SMA导线再入隔离系统在被动结构控制中的适用性。
Khan和Lagoudas[19]利用SMA弹簧将单自由度(SDOF)系统从振动台模拟的地面激励中分离出来进行了分析研究。结果表明,SMA弹簧的隔振取决于弹簧的相对位移,小位移不会引起应力诱发的马氏体相变。而且,SMA弹簧只有在系统振动频率接近其谐振频率且负载水平较高的情况下才能达到最佳的隔离效果。图6为mayes等人开发的SMA弹簧隔离系统的实验设置,该实验是由同一研究组进行的。结果表明,SMA弹簧对振动系统动态响应的显著影响主要体现在两个方面:大大改变了系统的谐振频率和谐振幅值。
Corbi[4]提出利用SMA筋相关的多层剪力框架低水平部分(如图7所示)来隔离地面激励。数值模拟结果表明,SMA筋隔离装置无论是在响应降低还是在再定心能力上都能显著提高结构的动力响应能力。
需要强调的是,对于隔震装置,由于卸荷后的残余应变为零,仅对超弹性SMA进行了研究。但是,为了提高超弹性SMA隔离装置的阻尼效果,可以引入马氏体SMA元件来帮助耗散更多的能量。Dolce等人的再定心装置[8]是超弹性和马氏体SMAs结合的一个很好的例子。
图4高架桥SMA隔离装置原理图[37] 图5 [8]建筑SMA隔离系统示意图
图6 SMA弹簧隔离装置[19]原理图 图7用于MDOF结构的SMA肌腱隔离系统示意图[4]
图8 SMA支撑加固框架结构[3]的设置示意图
4.2.3.SMA耗能器件
SMA耗能装置的形式有框架结构支撑[3、15、7、8、29、11、36、34、1、32、13]、斜拉桥[21]
全文共15467字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[230],资料为PDF文档或Word文档,PDF文档可免费转换为Word

