
英语原文共 12 页
一种新的基于无损卡尔曼滤波器的AUV导航系统
B.Allotta a,c, A. Caiti b,c , R. Costanzi a,c , F. Fanelli a,c, D. Fenucci b,c, E. Meli a,c,n, A. Ridolfi a,c
文章信息
文章历史:
收到日期:2015年4月7日
接受日期:2015年12月30日
在线提供日期:2016年1月12日
摘要
自主式水下航行器(AUV)精确而稳健的导航策略的开发是实现复杂水下任务(通常包括一个以上的AUV)所需高性能的基础。影响水下机器人导航系统精度的主要因素之一是基于运动车辆模型和线性估计的车辆运动估计算法。精确可靠的导航系统确实是AUV的基础:全球定位系统(GPS)信号在水下不可用,因此很难实时知道飞行器的位置。在本文中,作者提出了一种创新的导航策略,专门为AUV设计,基于迹卡尔曼滤波器(UKF)。新的算法被证明是有效的,如果适用于这类车辆,使我们能够实现一个令人满意的精度提高比标准导航算法。已使用在2014年地面破碎(BTS 2014)研讨会期间进行的FP7欧洲箭头项目测试框架内,在Biograd na Moru(克罗地亚)进行的适当海上测试中获得的导航数据,对拟议战略进行了实验验证。所涉及的车辆是两个台风AUV,由佛罗伦萨大学工业工程系在托斯卡纳同义词库区域项目内开发和建造,用于探测和监测水下考古遗址。本文所描述的实验是为了初步测试这些AUV之间的协同导航。新的算法已经初步测试了路线,对所提出的策略的验证为估计车辆动态行为提供了准确的结果。
关键词:水下机器人 水下机器人导航 海洋机器人水下航行器
1引言
目前,自主式水下航行器(AUV)在许多应用领域得到了广泛的应用:它们被用于科学目的(例如考古遗址的勘探和监测),完成深海工业任务(例如石油和天然气工业中的开发),进行勘测和巡逻。在军事领域,甚至执行搜救任务。
无论车辆执行的任务类型如何,精确和稳健导航系统的可用性,即用于实时估计车辆姿态的适当硬件和软件组件,都至关重要(Fos Sen and Ocean,1994;Siciliano and Khatib,2008;Antonelli,2006;Caffaz等人,2010)。事实上,实施任务所需的高精度甚至可能涉及多个飞行器(allotta等人,2015a;breivik和fossen,2005;petres等人,2007;fjellstad和fossen,1994),使得运动估计成为水下自主导航的关键因素,需要精确和公认的轻量化估计算法。导航系统的质量不仅影响所执行任务在所需路径和执行路径之间的位置误差,而且影响车载传感器所获取数据的地理参考过程的结果;这在考古学、历史或人类学相关的MIS中尤为重要。(例如,对古代残骸的勘探)。
除了定位任务的固有差异外,水下环境还存在其他限制,使估计过程更加复杂:例如,全球定位系统(GPS)信号在水下不可用,因此很难估计车辆位置。这就增加了对精确和强大导航系统的需求。
所使用的绝大多数运动估计滤波器是基于卡尔曼滤波器(KF)(Kalman and New,1960)和扩展卡尔曼滤波器(EKF)(Bar Shalom et al.,2001;Evensen,2009;Sayed,2008;Allotta et al.,2012,2015a),一个可用于非线性动力系统的KF扩展。此外,此类过滤器通常利用简化的车辆运动学和动力学模型;此类模型确实在精确再现现实和计算资源需求之间提供了良好的权衡,以便在不简化过多水下机器人物理行为的情况下在估算过滤器内实时使用。
本文提出了一种新的运动估计算法,该算法基于无损卡尔曼滤波器(UKF)(Julier和Uhlmann,1997年;Wan和Merwe,2001年;Ristic等人,2004年),并专门为AUV设计,利用现有机载传感器获取的数据,包括惯性、林耳速度、声学和深度传感器(Arrichiello等人,2011;Bahr等人,2009a;Bhar等人,2009b;Larsen,2000;Rigby等人,2006)。无损卡尔曼滤波器在性能和计算负载之间提供了一个方便的权衡,但据作者所知,它还没有在实际水下应用中得到广泛应用。
已经有专人投入到合适的SUV模型的开发中,当在递归估计过滤器中使用时,精确到足以产生一致的结果,但对于所需的计算负荷要求不高。
在研究活动的初始阶段,已对由佛罗伦萨大学工业工程部在托斯卡纳地区同义词库1项目框架内开发和构建的两台台风AUV所获得的数据进行了初步验证。FP7欧洲箭头2项目,allotta等人(2015b)2014年10月在Biograd na Moru(克罗地亚)举办的国际破表研讨会上进行的试验(图1)(国际破表研讨会官方网站)。对两种水下机器人之间的协同导航进行了初步的实验研究。
在测试过程中,车辆在航位推算中导航;测试了所提出的算法以及台风AUV的标准导航滤波器(基于扩展卡尔曼滤波器),并对其性能进行了比较,以评估新导航方法与在估算车辆动态行为方面的精度。获得的结果令人鼓舞;在不久的将来,拟议的导航过滤器将在台风AUV上实施,并将在试验活动期间在水中进行在线测试。
本文的组织结构如下:第2节介绍了台风级AUV,描述了其结构和所配备的传感器;第3节说明了描述飞行器行为的数学模型,包括其传感器和推进系统;此外,推导了车辆模型的状态空间表示。第4节说明了标准和建议的递归导航过滤器;第5.2节详细介绍了两种导航算法和实验数据之间的性能比较。
图1台风AUV在2014年BTS期间在Biograd na Moru(克罗地亚)进行了海上试验。
2 水下航行器描述
台风级水下机器人是佛罗伦萨大学工业工程系机电一体化与动态建模实验室(MDM实验室)在主题词库和箭头项目框架下开发和建造的中型水下机器人。
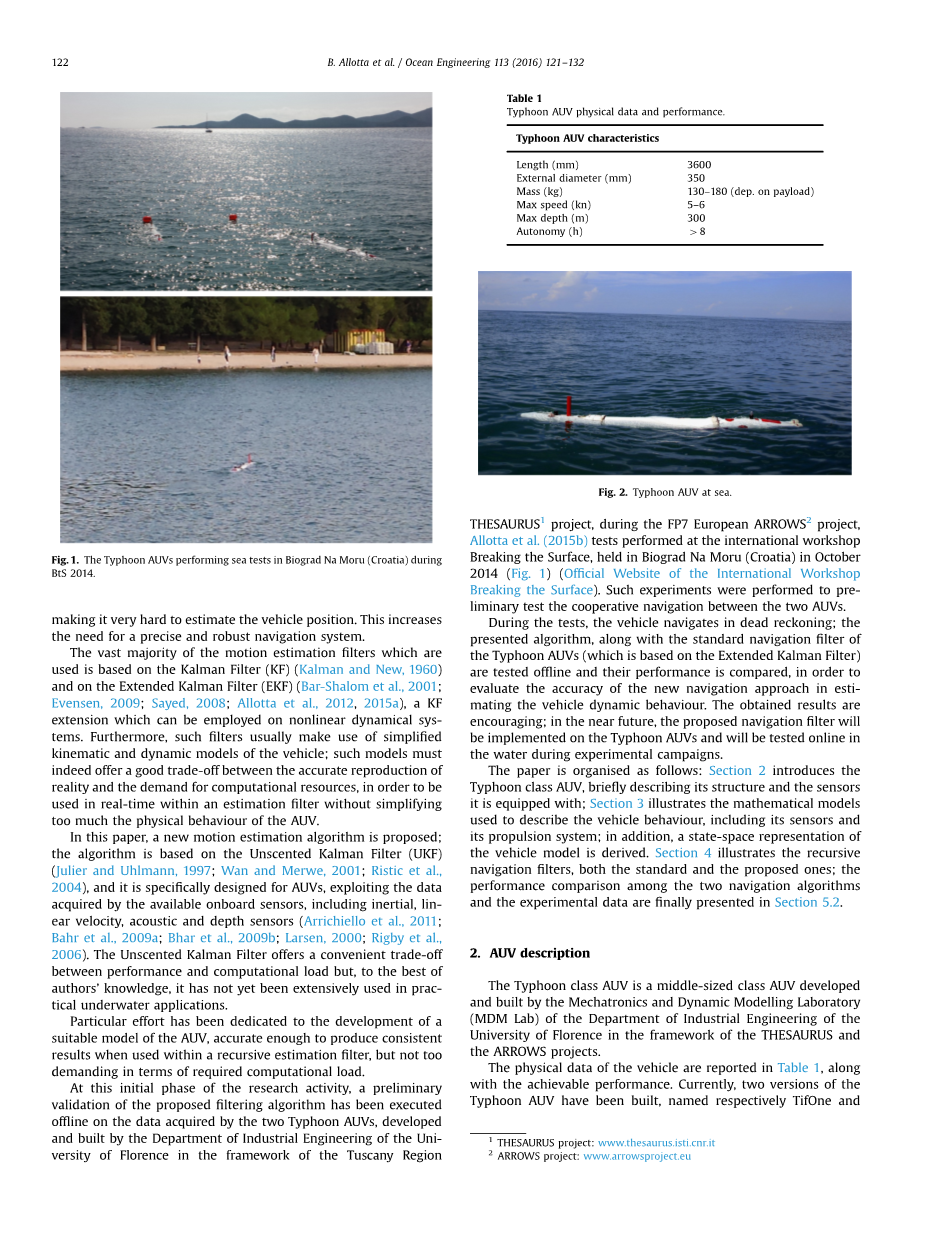
表1中报告了车辆的物理数据以及可实现的性能。目前,已建成两个版本的台风水下机器人,分别命名为tifone和tiftu。本文给出的结果参考了Tifone AUV(图2),在自主导航(合作导航)过程中与Tiftu进行通信。
台风的纵向、横向和垂直运动,以及偏航和俯仰角都是直接控制的,这要归功于两个主后推进器和四个推进器(两个垂直和两个横向),如图3所示。螺旋桨和推进器在飞行器上的位置如图4所示。
抗横摇运动的稳定性由静液压稳定性来保证,即浮力和重力中心的正确定位和对准。
可用于台风级AUV的传感器组包括:
全球定位系统(GPS);
超短基线(USBL);
深度传感器;
惯性测量单元(IMU);
多普勒速度测井(DVL)。
图2 海中的台风suv
3 车辆建模
3.1运动学和动力学模型
为了方便描述AUV模型,使用了两个合适的参考框架(Fossen和Ocean,1994),如图5所示。
固定惯性框架fonxnynzng的原点位于表面,其轴指向北、东和下(内德参考框架);机身框架fobxbybzbg以AUV重心为中心,X轴指向车辆前进方向,Z轴向下,Y轴完成右手参照系。
为了描述飞行器的运动学和动力学模型,采用了SNAME符号(Fossen和Ocean,1994年);因此,AUV模型用以下向量表示:
eta;包括用惯性系表示的车辆位置(eta;1)和方向(eta;2)(注意,关于定向,已经使用了三组欧拉角;在所考虑的情况下,这些角是横摇角、纵摇角和横摆角,而nu;是由车身框架中表示的AUV的线性(nu;1)和角速度(nu;2)组成。
引入的量通过以下运动关系联系起来:
为Rbn(n2),即惯性与机身之间的旋转,以及Tbn(n2),角速度与所选欧拉角的时间导数之间的转换矩阵。
AUV的动力学由以下方程控制(Fossen and Ocean,1994年):
m为质量矩阵, 和 分别为离心矩阵和科里奥利矩阵以及阻尼效应矩阵,
为重力和浮力效应矢量, 为作用于车辆的合力和力矩矢量。(作为控制
输入,即与交付推力相关的电机转速(Carlton,2007;Pivano和Johansen,2009;Allotta等人,2015a))。
3.2 车辆模型的状态空间表示
为了使用递归数字运动估计滤波器(例如,卡尔曼滤波器),需要车辆模型的离散状态空间表示;因此,系统必须用一组方程描述,形式如下:
其中xk是kth瞬时状态变量的矢量,uk和yk是系统的输入和输出,wk和vk分别是加性过程和测量噪声。(4)中的第一个方程称为系统演化方程,而第二个方程称为测量方程。
在这种情况下,状态向量的选择如下:
X是一个12维状态向量,包含描述AUV运动的运动学量。
根据前面的章节,系统的时间演化由以下方程式确定:
公式(6)中表示的模型随后根据以下考虑进行了简化:由于车辆沿横向的拖曳强烈地抑制了横向和纵向运动,因此仅在纵向(即向前运动的方向)上发生相当大的动力学。这对自动驾驶汽车尤其适用:AUV通常具有鱼雷形状,并沿纵向(阻力最小的方向)行驶,以节省船上的能量(例如保持电池充电)。
此外,简化的模型减少了未知参数的数量,缩短了计算时间;这尤其有利,因为该模型必须在递归运动估计过滤器中实时使用。
基于这些合理的考虑,推导出了简化的状态空间模型,只考虑与动力学有关的纵向自由度:
是作用于车辆X轴的力(Carlton,2007;Pivano和Johansen,2009;Allotta等人,2015a)。
必须特别注意方程式方程式(7)中表示的纵向加速度
的表达式是从完整的动力学模型(3)(Fossen and Ocean,1994)中获得的,为了减少未知参数的数量,对其进行了进一步的模拟:
其中,af是AUV的正面区域,cu是纵向阻力效应系数,m是飞行器的质量。
式(9)是根据以下假设得出的:
- 质量矩阵是对角的:这种考虑源于这样一个事实:对于台风AUV,车身参考框架与车辆的惯性主轴对齐;
- 阻尼矩阵是对角的:这一假设等于忽略耗散效应之间的耦合,即如果速度不太高是合理的。此外,对于Fossen and Ocean(1994)给出的 形式,只考虑了二次阻尼项;
- 重力、向心和科里奥利效应被忽略了。
连续时间模型(7)随后被一阶欧拉方法分解,以获得适合用于数字估计滤波器的分解时间表示。用Delta;t表示离散时间系统的采样周期,得出以下方程:
关于测量方程,可用数量是安装在车辆上的传感器的输出:
因此,测量方程是确定的:测量函数hk(.)可以通过一个矩阵hkmeas表示,该矩阵的行包含1或0个元素,矢量vk收集第5.1节中介绍的每个传感器的测量噪声:
矩阵hkmeas的实际大小在每次采样时都会发生变化:由于传感器具有不同的工作频率,一旦确定了Delta;t,就会在每个采样周期询问传感器是否进行了新的测量,如果没有,则会删除相应的hkmeas行。
根据公式,(7)–(9)车辆(简化)模型的状态空间表示具有高度非线性和不可微性(例如,注意存在二次项或符号函数);这意味着不可能使用线性过滤算法来估计车辆状态(如卡尔曼过滤器)。
必须特别注意方向eta;2的测量(也可参见第5.2节了解更多详细信息),这将深刻影响导航算法的性能。在该应用中,使用了XSens MTI IMU传感器。这种设备能够检测三维的小方向变化感谢估计内部所有者算法。XSENS平台中使用的算法是受保护的信息,即基于加速度计、陀螺仪和磁强计的原始数据开发用于方位估计的专有算法Rithm:Mahony等人就是这方面最先进的一个例子。(2008)。然后将XSENS提供的方向角和通过专有算法eta;2预处理的方向角用于导航过滤器中,以评估eta;23meas。
在高度干扰的环境中,例如金属物体产生不可忽略的磁噪声时,用于确保有效车辆定位的导航策略基于两个独立的算法,分别是方向估计算法和位置估计算法。前者不再仅仅利用非线性互补滤波器中的XSENS和传感器融合:为了保持鲁棒性,作者还集成了一个单轴光纤陀螺(FOG),并在水下领域开发了一种创新的算法,以获得可靠的方位估计(allotta等人,2015C)。在这种情况下,将XSENS提供的方向角和通过新算法eta;2预处理的方向角用于导航过滤器中,以评估
eta;23meas测量值。
4 导航过滤器
本节介绍用于估计系统状态向量的导航过滤器,其性能将在第5.2节中进行比较。
系统演化模型(10)的非线性意味着线性滤波器不能用于估计系统状态。因此,采用了两种非线性滤波器,即扩展卡尔曼滤波器(EKF)和无气味卡尔曼滤波器(UKF)(Kalman and New,1960;Bar Shalom et al.,2001;Julier an
资料编号:[4134]
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

