
英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
文章
用于车辆检测的改进型YOLOv2
Jun Sang1,2,*,Wu Zhongyuan Wu1,2,Pei Guo1,2,Haibo Hu1,2,Hong Xiang1,2,Qian Zhang1,2 和蔡斌1,2
- 重庆大学网络物理学会可信服务计算教育部重点实验室,重庆40004;zhongyuanw@cqu.edu.cn (Z.W.); pei.guo@cqu.edu.cn (P.G.); hbhu@cqu.edu.cn (H.H.); xianghong@cqu.edu.cn (H.X.); zhngqn@cqu.edu.cn (Q.Z.); caibin@cqu.edu.cn (B.C.)
- 重庆大学大数据与软件工程学院,重庆401331
* 通讯:jsang@cqu.edu.cn;电话: 86-139-8369-7592
收到:2018年10月26日;接受:2018年11月30日;发布时间:2018年12月4日 更新
摘要:车辆检测是智能交通系统中对象检测的重要应用之一。它旨在从包含车辆的图片或视频中提取特定的车辆类型信息。针对现有车辆检测技术缺乏车辆类型识别,检测精度低,速度慢等问题, 提出了一种基于YOLOv2的新型车辆检测模型YOLOv2_Vehicle。使用k-means 聚类算法对训练数据集上的车辆边界框进行聚类,并选择了六个大小不同的锚点框。考虑到不同比例尺的车辆可能会影响车辆检测模型,采用归一化来改进边界框长度和宽度的损耗计算方法。为了提高网络的特征提取能力,采用了多层特征融合策略,去除了高层中重复的卷积层。在北京理工大学(BIT)车辆验证数据集上的实验结果表明,平均平均精度(mAP)可以达到94.78%。所提出的模型在CompCars测试数据集上也表现出出色的泛化能力,其中“车辆面部”与训练数据集完全不同。通过对比实验,证明了 该方法对车辆检测是有效的。此外,通过网络可视化,所提出的模型还具有出色的特征提取能力。
关键词:车辆检测目标检测YOLOv2;卷积神经网络
简介
为了妥善解决城市交通问题,克服现有不足的车辆信息不足,车辆信息检索精度低等弊端,大力发展智能交通。作为该方法必不可少的一部分,车辆检测已被全世界的研究人员广泛研究。
目前,常见的车辆检测方法可以分为两类:传统方法和基于深度学习的方法。传统方法是指传统的机器学习算法。参考文献[1-3]采用定向梯度直方图(HOG)方法提取图像中的车辆类型特征,然后使用支持向量机(SVM)对这些特征进行分类,从而实现车辆检测。在参考文献[4]中,提出了用于车辆检测的可变形零件模型(DPM),并获得了良好的结果。尽管这些传统的基于机器学习的方法的车辆定位和类型识别的准确性是可以接受的,但此类方法包括非常复杂的步骤,需要高度的人工参与并且花费太多时间。因此,这些方法不适合实际应用场景。近年来,深度学习[5]成为非常流行的研究方向。基于深度学习的对象检测
传感器2018,18,4272;土井:10.3390/s18124272 www.mdpi.com/journal/sensors
识别方法通常表现出比传统方法更好的性能[6-8]。为了获得更丰富的车辆功能,参考文献[9-11]使 用卷积神经网络(CNN)研究了车辆检测。这样的方法不需要人类参与的特征设计,而在网络能够自 动学习车辆类型特征之前,仅使用大量标记的车辆图像在监督下训练网络。在参考文献[12]中,使用 稀疏编码的无监督方法对网络进行了预训练,然后通过softmax对车辆进行分类。R-CNN [13]是深度学习对象检测领域中的第一个模型。该算法使用选择性搜索生成感兴趣的区域,从而基于区域建议创 建了深度学习对象检测方法, 如SPP-net [14], Fast R-CNN [15], Faster R-CNN [ 16] 和R-FCN [17]。参考文献[18]提出了一种自适应神经网络,该神经网络通过将最后一层划分为多个网络来提取 不同尺度的特征。它优于其他传统方法。参考文献[19]对CNN进行了改进,并提出了统一的多尺度深 度CNN(MS-CNN),用于将车辆分为两个子网络,即区域提议网络和检测网络,以进行车辆检测。结 果表明,该算法提高了精度,大大提高了内存和计算量。此外,MS-CNN可以以每秒帧的速率进行检测。参考文献[20,21]将基于Faster R-CNN的方法应用于车辆检测,并实现了良好的检测。参考文献[22] 结合了Faster R-CNN,VGG16和ResNet-152进行车辆检测,尽管速度较慢且不能满足实时车辆检测的要求,但仍实现了良好的车辆检测精度。通常,基于深度学习的方法的速度较慢,无法满足实时要求。检测精度和生成能力有待提高。因此,为提高基于区域的物体检测方法的速度和准确性,Redmon等人。将直接目标检测转换为回归,并提出了端到端目标检测方法YOLO [23]。在2017年,Redmon等人。提出了YOLOv2 [24]对象检测模型,该模型在保持检测精度的同时极大地提高了对象检测的速度。
为了提高车辆检测的准确性,速度和泛化能力,一辆新车
提出了一种基于YOLOv2的检测模型。k-means [25]聚类算法用于在训练数据集中选择六个具有不同大小的锚点框。为了减少不同尺寸车辆对车辆检测模型的影响,通过归一化改进了损失函数。此外, 通过采用多层特征融合策略并去除高层中的重复卷积层来设计YOLOv2_Vehicle网络,以提高网络的特 征提取能力。
YOLO和YOLOv2简介
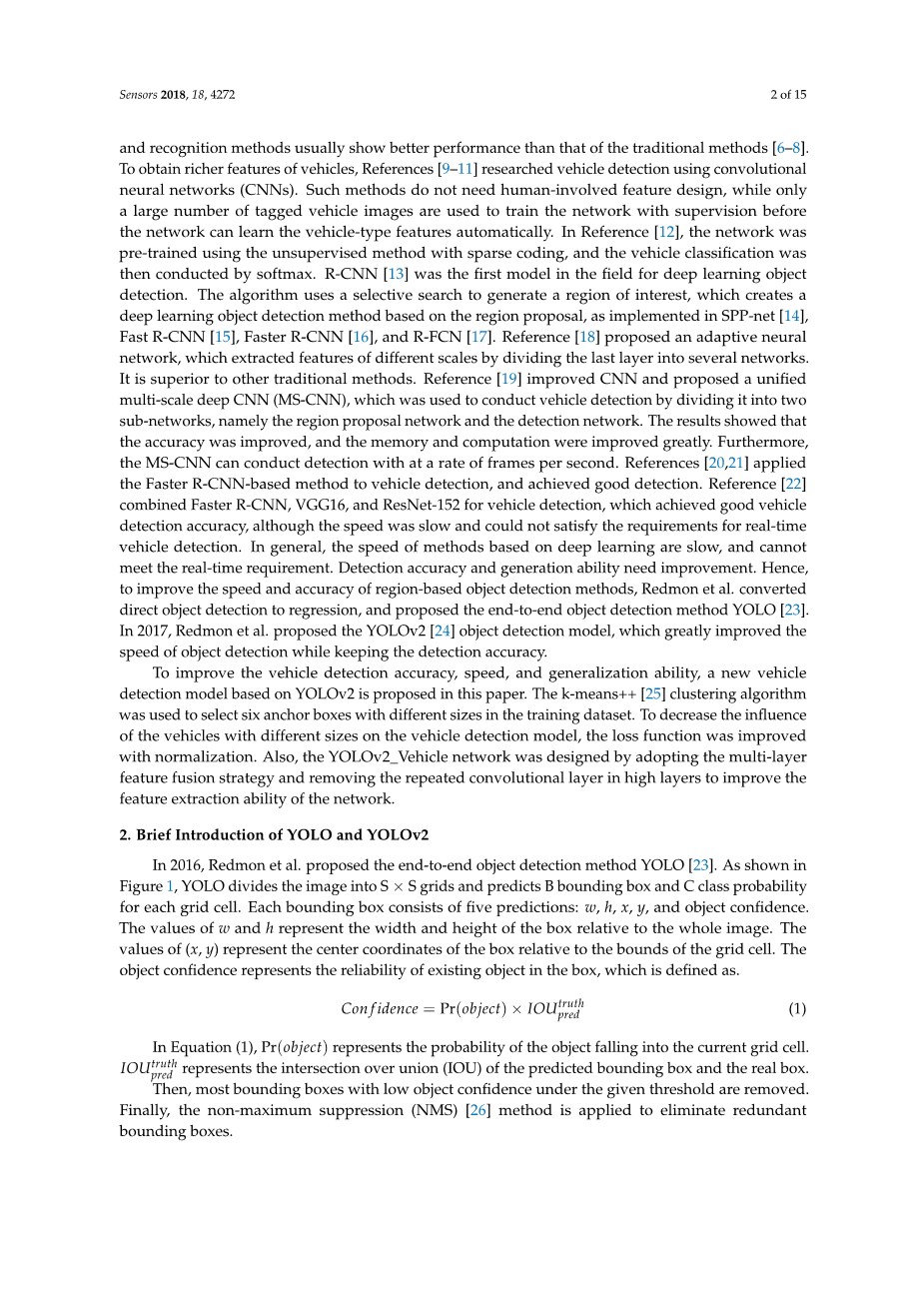
在2016年,Redmon等人。提出了端到端的物体检测方法YOLO [23]。如图1所示,YOLO将图像划分为Stimes;S网格,并预测每个网格单元的B边界框和C类概率。每个边界框包含五个预测:w,h,x,y和对 象置信度。w和h的值表示框相对于整个图像的宽度和高度。(x,y)的值表示框相对于网格单元边界的中心坐标。对象置信度表示框中现有对象的可靠性,定义为。
(1)
在公式(1)中,Pr(object)表示对象掉入当前网格像元的概率。IOU真相表示预测边界框与实
掠 框的交集相交(IOU)。然后,移除在给定阈值下具有低对象置信度的大多数边界框。
最后,采用非最大抑制(NMS)[26]方法来消除冗余边界框。
图1. YOLO对象检测流程图。
为了提高YOLO预测精度,Redmon等人。在2017年提出了新版本的YOLOv2 [24]。通过删除网络的整个连接层,设计了一种新的网络结构Darknet-19,并将批处理规范化[27]应用于每层。参照Faster R-CNN的锚定机制,使用k均值聚类获得锚定框。另外,使用直接预测对预测框进行了重新训练。与YOLO相比,YOLOv2大大提高了目标检测的准确性和速度。
但是,作为一般的物体检测模型,YOLOv2适用于要检测的类别多种多样,并且人,马,自行车等 类别之间的差异较大的情况。但是,对于车辆检测,差异通常在局部区域,例如轮胎,前灯等。因此, 为了更好地检测车辆,本文提出了一种改进的YOLOv2车辆检测方法,并在验证数据集和“车辆面部”与 训练数据集不同的另一个数据集上获得了良好的性能。
数据集
在本文中,使用了从道路监控收集的两个车辆数据集,即北京理工大学( BIT)-车辆[28]和CompCars [29]。BIT-车辆数据集由北京理工大学提供,包含9580张车辆图像。它包括六种车型:轿车,运动型多功能车(SUV),小型客车,卡车,公共汽车和小型货车。每种类型的图像数量分别为 5922、1392、883、822、558和476。CompCars数据集由斯坦福大学提供,由两个子数据集组成。一个数据集涉及从互联网上收集的1687辆汽车的商用车模型图片。另一个涉及从道路监控摄像机收集的车辆图片。CompCars仅包含两种车辆类型:轿车和SUV,具有40,000多个图像。这两个数据集都包括白天和夜晚。此外,两个数据集中的图像都在晴天,并且不存在噪声背景,下雨,下雪,人,其他车辆类型等。
BIT-Vehicle数据集按8:2的比例分为训练数据集和验证数据集,其中训练数据集和验证数据集中的图像数量分别为7880和1970。为了进行训练和验证,夜间图像的数量分别约为1000和250。为了进一步研究所提出模型的泛化能力和特征,从CompCars数据集的第二个子数据集中随机选择了800张车辆图像用于测试数据集,并对其进行了手动注释。
BIT-Vehicle和CompCars数据集中的某些图像如图2和3所示。这两个数据集之间存在很大差异。但是,为了进一步研究所提出模型的泛化能力并将其与其他模型进行比较,有必要使用CompCars数据集的第二个子数据集作为测试数据集。
图2.北京理工大学车辆数据集
改进的YOLO_v2车辆检测模型
图3. CompCars数据集中的一些图像。
锚盒的选择
本文采用k-means 聚类对BIT车辆训练数据集中车辆边界框的大小进行聚类分析。选择适合车辆检测的锚盒的数量和大小。在实现k-means 时,不是使用传统的欧几里得距离,而是应用了YOLOv2的距离函数。如等式(2)所示,将IOU用作评估度量,这使得误差与锚盒的尺寸无关。
(2)
如图4所示,通过分析聚类结果,k的值最终设置为6,这意味着将应用六个大小不同的锚点盒进 行定位。图4的右侧显示了六个聚类锚框。从锚盒中可以看出,一些群集锚盒既细又长,而另一些则 是方形的。这些形状符合六种车辆类型的实际形状,同时还包括有关距相机距离的信息。因此,通过 使用k-means 对训练数据集进行聚类分析,可以获得适合车辆检测的锚框大小,可以提高定位精度。
损失功能的改善
图4.群集的锚框信息。
对于车辆检测,由于车辆图像是从道路监控摄像机获取的,因此这意味着车辆在检测过程中接近摄像机。如图5所示,当汽车离相机较远时,它在图片中显得更小。当离相机更近时,它将占据图像中更大的区域。因此,即使车辆类型相同,图片中的尺寸也可能不同。
图5.同一辆车不同距离的比较。
在训练YOLOv2时,不同的对象大小对整个模型具有不同的影响,与较小的对象相比,较大的对象导致更大的误差。为了减少这种影响,使用归一化改进了边界框宽度和高度的损耗计算。改善的损耗函数如公式(3)所示。
其中xi和yi是第i个网格单元的框的中心坐标,wi和hi是第i个网格单元的框的宽度和高度, Ci是第i个网格单元格的置信度,而pi(c)是第i个网格单元格的置信度。此外,xcirc;i,ycirc;i,wcirc;i,hcirc;i,Ccirc;i和p)i
(c)是xi,yi的相应预测, wi,hi,Ci和pi(c);lambda;协调表示坐标的权重
损失,lambda;noobj表示没有物体损失的边界框的权重。最后,S2表示
Stimes;S网格单元,B表示方框,I对象表示对象i 是否位于单元格i中,I对象 ij
表示单元格i中的第j盒预测变量对此预测“负责”。在公式(3)中,第一行计算坐标损失,第二行计算边界框大小
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238920],资料为PDF文档或Word文档,PDF文档可免费转换为Word

