管状微纳米马达:从基本理论到最新进展
摘要:近年来,科学家们开始研究微纳米级别的机器,这些能够自主运动的微纳米机器在物质运输、检测、生物医学和环境治理等方面有广阔的应用前景。微纳米马达具有多种几何形态,其中管状微纳米马达有不对称的内外表面,内表面上发生的化学反应能够为马达的运动提供动力,通过修饰外表面可以实现马达的功能化。这篇文章对管状微纳米马达的概念进行了综述,包括其基本原理、制造方法以及驱动机理。通过催化反应分解燃料,管状微纳米马达可以产生强大的推动力,从而在复杂的自然环境或生物环境中运动;经过表面修饰后的马达可以特异性地捕获、运输并释放目标物质。同时,马达的运动所产生的自混合效应促进了其在传感和净化方面的应用。此外,非催化反应驱动的管状微纳米马达为实现马达的体内应用提供了更多可能。目前,先进的管状微纳米马达在芯片实验室、体内诊断等诸多前沿领域有广阔的应用前景。
1.简介
上个世纪,大型机械的应用推动了社会各方面的发展。从一开始,蒸汽机的发明引发了第一次工业革命。随后,内燃机的生产标志着技术革命的一个重大转折点,至今仍广泛地应用于工业和生活中。机械已经成为人类生活中不可或缺的一部分。1959年,费曼在演讲中说到,微纳米机器将开启科学技术的新纪元。随后,人们开始了对微纳米马达的研究。如何驱动马达是人们在研究过程中所面临的一个重大难题,目前,科学家们提出了利用化学反应和生物分子运动等方法克服这一问题。现在,微纳米马达已经可以在微观尺度完成货物运输、分子检测等多个任务。
随着纳米技术的发展,研究者们开发了颗粒状、棒状、螺旋状及仿生形状等各种形态的微纳米马达。其中,由于内、外表面的不对称性,管状微纳米马达受到了极大地关注。马达的内表面由可以为运动提供推动力的催化剂或活性材料组成,而外表面则通过修饰从而实现特定的功能。这篇文章介绍了管状微纳米发动机的基本原理,包括其驱动机理、制备方法和控制方法,并介绍了基于催化反应的管状微纳米马达在货物运输、传感和环境修复领域的应用,以及基于非催化反应的管状微纳米马达在体内医学方面的应用。最后,文章对管状微纳米马达未来发展方向进行了展望。
2.在低雷诺数下的管状微纳米马达
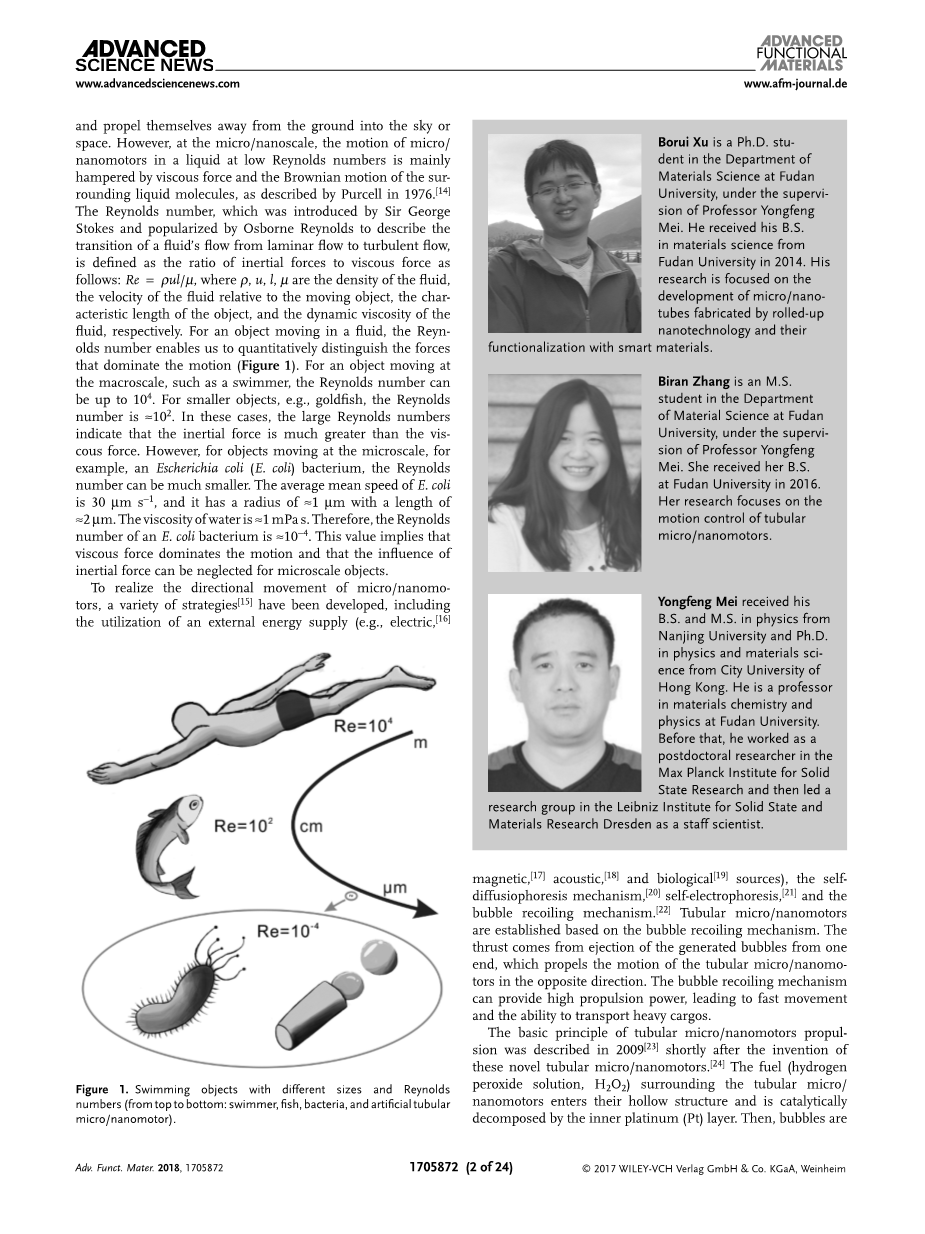
因为与火箭和喷气机有着相似的形状和驱动机理,我们也将管状微纳米马达称为微纳米火箭(micro/nanorockets)或者微纳米喷气机(micro/nanojets)。火箭和喷气机在升空过程中需要产生强大的推动力从而克服重力,微纳米马达想要在低雷诺数的液体中运动,则需要克服粘性力和周围液体分子布朗运动的阻碍。雷诺数这一概念是由Sir George Stokes提出,用于表示流体从层流到湍流的转变,被定义为惯性力与弹性力的比值,表达公式如下:Re=rho;ul/micro;,其中rho;,u,l,micro;分别表示流体的密度、流体的相对速度、物体的长度和流体的动力粘度。对于在流体中运动的物体,通过雷诺数可以定量确定主导运动的力。宏观的物体往往具有较高的雷诺数(例如:游泳者(104)、金鱼(102)),这表明他们所受到的惯性力远大于粘性力。而在微观尺度运动的物体的雷诺数往往很小,这说明其运动主要受粘性力的影响,惯性力的影响可以忽略。例如:大肠杆菌的平均运动速度30micro;m/s,半径约为1micro;m,长度约为2micro;m,水的粘度约为1mPas,因此大肠杆菌在水中的雷诺数只有10-4,这说明大肠杆菌的运动主要受粘性力影响。
为了驱动微纳米马达的运动,科学家们采用了一系列的方法,例如:外场力(电场、磁场、超声)、自电泳、自扩散电泳和气泡反冲等机制。大部分管状微纳米马达采用气泡反冲机制进行运动,气泡从微管的一端喷出,从而推动管状微纳米马达向相反的方向运动。气泡反冲机制可以提供较大的推动力,从而使马达具有快速运动和运载重物的能力。
管状微纳米马达驱动的基本原理在2009年被提出。管状微纳米马达通常以过氧化氢为驱动燃料,当燃料进入微管的中空结构后,会被内层的Pt催化分解进而产生气泡。气泡从管口较大的一端排出,产生的推动力推动马达向相反的方向运动。图2a展示了气泡在管内的产生过程。气泡自发向管径较大的一段移动,是由于管状结构的几何不对称性而产生的毛细作用力所导致的。
为了更好地理解管状微纳米马达的驱动机理,我们对细菌的游动进行分析。周毛菌的运动是通过螺旋状鞭毛的旋转产生的,每根鞭毛都通过钩子与嵌入在细胞膜中的环状结构相连接。细菌内的复杂反应将会使环状结构向某一特定的方向转动,进而会通过钩子带动鞭毛旋转,使细菌进行螺旋状运动。螺旋状鞭毛的转动产生的不对称的构型变形,是导致周毛菌可以在低雷诺数下运动的主要原因。与之相反,有一种沙门氏菌的突变体,它的鞭毛是直线状的,鞭毛的旋转并不能使沙门氏菌运动,这是由于细菌的构型并没有随鞭毛的旋转而改变。管状微纳米马达与周毛菌有相似的尺寸和流体力学性能,若想在低雷诺数的环境下运动,则需要发生不对称的构型变形。
我们将管状马达与单个气泡看作一个系统,马达的运动是由于气泡在管内一侧生长而产生的不对称几何变形所导致的。图2b为该系统的变形模型,Fjet和Fbubble分别表示作用在马达和气泡上的阻力。一个变形周期有4个阶段,从气泡以一定速度迁移到马达末端开始,到气泡与马达分离且在阻力作用下速度减小到零时结束。随后,另一个新气泡产生,变形过程即为不对称性的循环,当气泡达到一定的喷出频率后,马达就会产生连续的运动。
随着对管状微纳米马达关注的日益增强,人们建立了几种理论模型来定量分析马达的运动。此前,研究者们设计出一种计算马达平均速度的模型,该模型的计算结果与实验结果非常吻合。在这种模型中,我们将管状微纳米马达视作由矩形纳米膜卷曲而成的圆柱体,矩形纳米膜的长和宽分别为L和2pi;Rj,L和Rj分别为圆柱体的长和半径,该模型的计算公式如下:
其中,n为与氧气生成的速率常数,可由实验测得;v、C和Rb分别为管状马达的平均速度,溶液中过氧化氢的浓度和氧气气泡的半径。根据图2c所示的结果表示,管状微纳米马达的运动速率取决于过氧化氢的浓度以及马达的几何构型。进一步推导公式我们可以发现,管状马达存在一个最大运动速度,在实际应用中应当考虑这一现象。
大多数的模型(包括上述的这种)只能计算圆柱或圆锥形微纳米马达的运动参数,但仍然有一些其他结构的管状微纳米马达,如双锥形。Li等人设计了一个新的模型,可以计算任意形状的管状微纳米马达的阻力和阻力系数。在这个模型中,马达被视作静止的物体,其周围的流体以恒定速度进行平移运动,阻力系数Cd的计算公式如下:
其中,xi;=L/Rmax,xi;′=L/Rm。Rmax和Rm分别为马达管口较大端的半径和横截面半径。Re为雷诺数,alpha;由马达的形状所决定,具体计算方法如下。
圆柱形:alpha;=-0.80685,
圆锥形:
双锥形:
其中,theta;是锥形结构的半锥角。图2d表示了不同theta;值下xi;与Cd的关系,xi;在从0增加到3时,Cd迅速减小;当xi;大于6时,Cd又随xi;的增大而缓慢增大。从图中可知,半锥角越大则阻力系数越小,从而作用在管状微纳米马达上的阻力越小。假定使管状马达以恒定速度移动,则需要气泡产生的推动力和外界的阻力相等。因此,管状马达的推动力和马达的几何形状密切相关,如果想要使马达产生更强的推动力,应当增加马达的半锥角。但是,由于在制造马达的过程中xi;通常大于6,所以应当适度减小半锥角。
3.制备方法和运动控制
3.1 制备方法
正如之前所说的,管状微纳米马达通常利用气泡进行驱动,一般气泡只产生在管内,以高效地提供驱动能量。因此,在制备管状微纳米马达时,我们需要制备内外两层,控制内层产生气泡从而提供推动力。制备具有不对称性的多层管状微纳米马达的常用方法有两种:卷曲技术和模板辅助沉积技术
3.1.1 卷曲技术
卷曲技术利用了材料自身的应力应变,现已被广泛应用于管状微纳米结构的制造。简单来说,卷曲技术就是通过刻蚀牺牲层使具有应力梯度的纳米膜产生应变从而卷曲成微纳米管。十多年前,研究者便通过蚀刻AlAs牺牲层,使InAs / GaAs双层纳米膜卷曲成微纳米管。由于在结构设计和材料选择方面的多样性,卷曲技术成为了制备管状微纳米马达的常用方法。首先利用平板印刷技术(photolithography)将光刻胶作为牺牲层涂覆在基底上,然后将预先设定好应力梯度的材料通过物理气相沉积或化学气相沉积等方法沉积在牺牲层上。在进行物理气相沉积的过程中,由于存在掠射角,因此通过阴影效应基底上会形成一块没有材料沉积的区域,该区域作为刻蚀牺牲层的刻蚀前沿。在用丙酮溶液刻蚀牺牲层后,薄膜将会释放应力从而卷曲成管状结构。此前报道了一种Ti/Fe/Au/Ag多层管状微纳米马达,其中,Ag作为催化层分解过H2O2产生O2气泡从而提供推动力,通过外部磁场对Fe层的作用来控制马达的运动。有研究者用Pt代替Ag,发现了一种新的用来制备管状马达的自卷曲薄膜,如图3a-i。该方法所制备的马达的长度(100 micro;m)取决于基底的尺寸(图3a-ii),通过扫描电镜图像,可以测量得到马达的直径约为5 micro;m(图3a-iii)。马达的运动速度可以达到2mm/s,在外部磁场的控制下,可以做直线、旋转以及螺旋运动。
由于光刻胶牺牲层需要使用湿法刻蚀,因此如果不及时烘干,表面张力将会破坏管状结构。最近,研究者们发明了一种基于氧化石墨烯和硅基底的卷曲技术,由于氧化石墨烯和硅之间是通过弱键和作用连接的,一旦受到超声作用,氧化石墨烯就会被基底释放。在制备时,首先将悬浮的氧化石墨烯溶液滴涂在基底上,然后依次沉积Ti层和Pt层,经超声处理后,三层纳米膜被释放到溶液中,进而自动卷曲成管状结构。
此外,有研究者提出了一种通过加热分解牺牲层的干法释放方法,首先将聚甲基丙烯酸甲酯(PMMA)旋涂在基底上作为牺牲层,然后将氧化物结构层(具有内应力)以及金属层沉积在PMMA上,将制成的样品制于氮气中进行快速热吸收(RTA),PMMA层的热解将导致纳米薄膜释放并在预应力的作用下卷曲成管。同时,金属层受热后会形成纳米颗粒从而在表面产生毛细作用力,这有助于薄膜的自卷曲(图3b-i)。与普通的卷曲技术相比,采用RTA技术制备的微管尺寸更小,直径可低至几百纳米。同时,Ag、Pt(图3b-ii,iii)金属纳米颗粒具有更高的比表面积,能够加快H2O2分解,因此与具有光滑金属表面的马达相比,采用RTA技术制备的马达具有更快的速度。
还有一些其他方法能够用于卷曲法制备管状微纳米马达。比如,Pumera等人用透射电镜的栅格对纳米膜进行图案化,从而省略了需要使用无尘室的平板印刷步骤,该方法以PMMA作为牺牲层,最终用H2O2超声溶解去除(如图3c-i),将设定好预应力的Pt沉积在PMMA层上,当PMMA层溶解后,Pt层会自动卷曲成管状马达。但是,该方法制备出的管状马达具有不规则的末端(图3c-iii)。还有一种方法,可以通过组织细胞快速制备大量的管状微纳米马达,避免了复杂的工艺流程(图3d-i)。首先将组织细胞分散在水中,然后沉积在基底上,再把Pt沉积在组织细胞层上,最后通过超声去除组织细胞层,Pt层将自动卷曲成微纳米管。这两种制备方法较为简单、要求较少、成本较低,对卷曲纳米技术的未来发展有着极大的意义。
卷曲技术是制造管状微纳米马达的一种便捷可靠的方法,可以通过控制牺牲层图案和沉积参数来控制管状马达的几何形状。此外,随着牺牲层和涂覆材料的选择的增加,微纳米马达的组分构成也有着更多可能。几何尺寸和材料选择的多样性为卷曲技术制备微纳米马达提供了广阔的前景。
3.1.2 模版辅助沉积
运用模板辅助沉积法,材料可以直接在模板上形成三维管状结构,通过选择不同的模板从而设计马达的形状。模板辅助沉积法可以分为两种:内部模板(如线模板(图4a-c))和外部模板(如多孔膜(图4d-h))。
纳米线通常被用作内部模板,通过去除纳米线,沉积在纳米线上的材料将会形成管状结构。早在2000年,研究者们用可热解的聚合物纳米线作为模板,将材料沉积在模板上,通过加热去除纳米线从而得到微纳米管。用类似的方法还可以制造半导体GaN纳米管,研究者选择四方结构的ZnO纳米线作为GaN单晶生长的模板,在去除ZnO纳米线后,得到了完好的GaN纳米管。2010年,首次报道了用模板辅助沉积法制备的自驱动微纳米马达,该马达以Ag纳米线为模板制备而成。首先,用HNO3将Ag纳米线刻蚀成圆锥形(图4b-i),然后用电沉积技术在纳米线上依次沉积Pt层和Au层,最后将Ag纳米线模板刻蚀掉后,得到锥形的管状微纳米马达。(图4b-ii)
内部模板法还可以合成石墨烯基的管状微纳米马达。最近报道了一种长度和直径可调的石墨烯纤维管状微纳米马达的合成方法。先将氧化石墨的悬浮液注入直径为几百微米的玻璃微管中,接着将玻璃微管密封并在230°C下加热2h,微管内会形成石墨烯纤维。由于毛细作用力的影响,多孔石墨烯纤维将失去水分,直径减小到数十微米。因此,为了得到管状结构,研究者在玻璃微管中放入铜丝作为内部模板,加热时,石墨氧化物会聚集在铜丝周围并附着在铜丝上生成石墨烯纤维,反应结束后用FeCl3 / HCl溶液蚀刻Cu线从而得到石墨烯微管(图4c-i)。同时,可以用多条Cu线作为模板来生产多孔微管(图4c-ii,iii)。在刻蚀铜线之前,可以用功能性材料(例如Pt,Pd,TiO2纳米颗粒)对微管的外壁进行改性。如果铜线在放入氧化石墨溶液前被功能性纳米颗粒所覆盖
全文共19240字,剩余内容已隐藏,支付完成后下载完整资料

英语原文共 24 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13736],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 复杂热电材料外文翻译资料
- 以自蔓延高温烧结方法制备热电化合物以及燃烧合成的新标准外文翻译资料
- 氮掺杂分级多孔碳作为氧还原反应的高效电化学催化剂的研究外文翻译资料
- 孪晶诱导塑性高嫡合金的设计外文翻译资料
- 含铌先进Fe-Cr-Ni型奥氏体耐热钢富铜相的析出强化在超临界电厂的应用外文翻译资料
- 不同温度下直接能量沉积层状工具钢的弯曲强度外文翻译资料
- BiFeO3的光伏效应外文翻译资料
- 通过氢稳定的MgaPt研究核壳纳米结构Mg@Pt中快速“氢泵”的可视化外文翻译资料
- 一种铱核心环金属有机配体显著地提高了有机太阳能电池 的光伏性能外文翻译资料
- 钠离子电池的高性能阳极材料:三组分共组装法制备层次多孔碳外文翻译资料

