
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
在射线光学系统中,单光束梯度激光阱在介质球上的力
摘要:
我们计算了单光束梯度光阱在射线光学系统中对微米大小的介电球辐射压力,这也称为光镊。这是一个简单的用于描述激光捕获和在细胞内操纵活细胞和细胞器的模型。在射线光学极限下,对复杂形状的光束定义了梯度力和散射力。在球体的整个横截面上,使用TEM.0和TEM*模式输入强度曲线和不同折射率的球体来计算力。强大的均匀陷阱是可能的,在力的变化不超过一个因子2在球体横截面。对于10mw功率的激光和相对折射率为1.2的情况下,我们计算出在梯度陷阱的最弱(向后)方向上的捕获力,最高为- 1.2 x10 -6 dynes。结果表明,良好的诱捕能力需要高的数值孔径目标的高会聚光束。也给出了使用亮场或差分干涉对比光学和相位对比光学方法的比较。
介绍:
本文详细描述了一种所谓的单光束梯度光阱捕获微米级介电球的方法。这种介电球可以作为生物诱捕实验中活细胞的第一个简单模型,也是物理诱捕实验中的基本粒子。在物理科学中,利用激光辐射压力对小颗粒的光捕获技术已经应用了20年,用于对微米和亚微米的操纵和研究。介电粒子,甚至单个原子。这些技术最近也被扩展到生物粒子。
作用于介电粒子和原子的基本辐射压力是已知的。对于比波长大的电介质球,一种是在几何光学系统中,因此可以用简单的射线光学来从入射光动量的散射中推导出辐射压力。这种方法用于计算微米级介电球的原始捕获实验的力。这些早期的陷阱要么是双光束光学陷阱,要么是单束悬浮陷阱,它们需要重力或静电力来维持它们的稳定性。对于瑞利体系中的粒子,其大小比波长要小得多,粒子就像一个简单的偶极子。偶极子的力自然地分为两个分量:一个所谓的散射力分量指向入射光的方向,一个梯度分量指向光强梯度的方向。
单光束梯度陷阱,有时被称为“光镊”,最初是为瑞利粒子设计的。它由一束强聚焦的激光束组成。从概念上讲,这是最简单的激光陷阱之一。它在瑞利体系中的稳定性是由于梯度力的主导作用,将粒子推向光束的高焦点,而散射力试图将粒子从入射光的方向移开。随后在实验中发现单光束梯度陷阱也可以诱捕和操纵微米大小和各种生物粒子,包括活细胞内的活细胞和细胞器。利用红外诱捕光束获得了很好的结果,并减少了光学损伤。这些生物应用中的陷阱被建立在一个标准的高分辨率显微镜中,其中一个使用相同的高数值孔径(NA)显微镜的目标来捕获和观察。在生物科学中,单光束梯度陷阱的显微操作能力得到了广泛的应用,在病毒和细菌的捕获过程中进行了许多实验:对酵母细胞、血细胞、原生动物和各种藻类和植物细胞的处理;测量细菌鞭毛的依从性;内部细胞手术;对染色体的操纵;对精子细胞进行捕获和力的测量;最近,观察到运动分子在微管中驱动线粒体和乳胶球的力量。光学技术也被用于细胞分类。
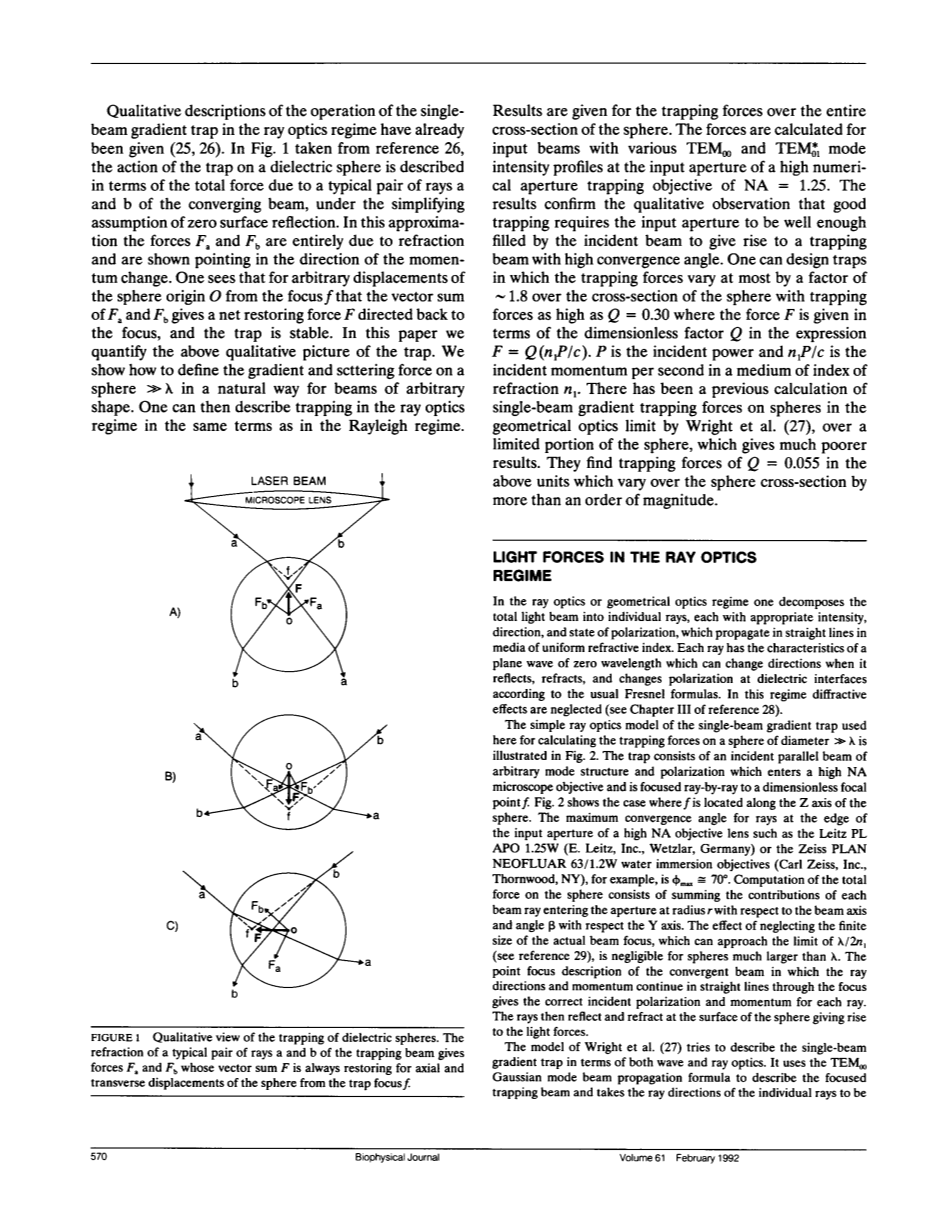
在射线光学系统中,对单个光束梯度陷阱的定性描述已经给出了。在图1中,在零表面反射的简化假设下,在一个介电球上的陷阱的作用被描述为由于一个典型的射线a和b的会聚光束的总力。在这个近似中,Fa和Fb完全取决于折射率,并指向动量变化的方向。我们可以看到,对于球体原点0的任意位移,Fa和Fb的矢量和得到一个净恢复力F指向焦点,并且陷阱是稳定的。在本文中,我们量化了上述陷阱的定性图像。我们展示了如何以自然的方式定义一个远大于波长的球体在任意形状的光束作用下的梯度力和散射力。然后,我们可以用与瑞利(Rayleigh)粒子相同的术语来描述在射线光学系统中捕获的陷阱。结果给出了在球体的整个横截面上的俘获力。在高数值孔径捕获目标NA = 1.25的输入孔径上,并在不同的TEM模式光强分布下计算了力,实验结果证实了该方法的定性结果,即入射光的输入孔径要足够满足入射束的要求,从而使入射光束具有较高的会聚角。我们可以设计这样一种阱,其中捕获力在球体的横截面上最多变化1.8倍,捕获力高达Q = 0.30,其中力F按照表达式中的无量纲因子Q给出 F = Q(n1*P / c),其中P是入射功率,n1*P/c是在折射率为n1的介质中的每秒入射动量。Wright等人已经在几何光学极限的球面上有过单光束梯度俘获力的计算,在球面有限的部分结果更差。他们发现在上述单位中Q = 0.055的捕获力情况下,在球体横截面上的变化超过一个数量级。
射线光学系统中的光力:
在射线光学或几何光学系统中,我们将总光束分解成单独的光线,每个光线具有适当的强度,方向和偏振态,其在均匀折射率的介质中以直线传播。每条射线都有一个零波长的平面波的特征,当它反射、折射,并根据通常的菲涅耳公式改变介质界面的偏振时,它可以改变方向。在这种情况下,衍射效应被忽略了。
在图2中,采用单光束梯度陷阱的简单射线光学模型,计算了直径远大于波长的球体的俘获力。该陷阱由任意模式结构和偏振的入射平行光束组成,该光束进入高NA显微镜物镜并且被聚焦到无量纲焦点f,图2显示了f位于球体的Z轴上的情况。在如Leitz PLAPO 1.25W (E. Leitz, Inc., Wetzlar, Germany) 或者Zeiss PLAN NEOFLUAR 63/1.2W的水浸高NA物镜的输入孔边缘处的光线有最大会聚角,比如说(Carl Zeiss,Inc.,Thornwood,NY)是70度。计算球面上的总力包括将相对于光束轴线以半径r进入孔径的每束光束的贡献相加,相对于Y轴角度beta;。由于忽略实际光束焦点的有限大小的影响(其可以接近lambda; / 2n1的极限)(参见参考文献29),对于远大于lambda;的球体可以忽略。聚焦光束的焦点描述,其中光线方向和动量以直线贯穿焦点,从而为每条光线提供正确的入射偏振和动量。光线在球体表面反射和折射,产生光力。
Wright等人的模型试图用波和射线光学来描述单光束梯度力阱。它利用TEMOO高斯模式光束传播公式来描述聚焦捕获光束,并将单个射线的射线方向与高斯光束相垂直。由于相位锋的曲率在光束上有很大的变化,射线方向也会发生变化,从高到30度或更多的值,到远场的波束轴,到光束焦点的0度,这是一个物理上的错误,因为这意味着光线可以在均匀介质中改变方向,这与几何光学是相反的,这也意味着光束的动量可以在不与物质物体相互作用的均匀介质中发生变化,这也违反了光动量守恒。高斯光束的光动量和射线方向的恒定性可以从另一个角度看,如果将高斯光束分解成平面波的等效角度分布(参见参考文献28的11.4.2部分),那么可以看出,这些平面波可以在没有动量或方向改变的情况下通过焦点传播。另一个重要的问题是高斯光束传播公式仅在小的远场衍射角的极限值为theta;#39;的横向偏振光束是严格正确的,其中theta;#39;=lambda; /pi;w, (w是焦斑半径)。因此,该公式对于良好陷阱中使用的高会聚光束不能准确描述,但高会聚光束的恰当波描述比高斯光束公式复杂得多。它涉及焦点处的强轴电场分量(来自边缘光线)并且需要使用矢量波方程而不是用于高斯光束的标量波方程。
除了在焦点附近的主要差异外,Wright等人的模型应该与在捕获光束的远场中使用的射线光学模型相当接近。然而,这两种计算的主要区别是,Wright等人使用了相对较小的会聚角的光束。他们计算了光斑尺寸为w的光束的力,w分别为0.5,0.6和0.7um,同时theta;#39;的值分别为29,24,21度。因此,这些光束相比较高数值孔径物镜得到的70度会聚角来说,它们的会聚角较小。
首先考虑单根功率为P的光线以入射角theta;射向小球,每秒入射动量为n1*P/c。整个球体所受到的力是由功率为PR的反射光和无穷多个功率连续下降的折射光,其中R和T是相对于表面为theta;的菲涅尔反射和透射系数。作用于原点0的合力可以被分解成Fz和Fy,这是由Roosen和他的同事给出的分量 (见附录I,有推导的草图)。
其中theta;和r分别是入射角和折射角。这些公式总结了所有散射光纤,因此是精确的。由于对于垂直或平行于入射平面偏振的光线,R和T是不同的,所以这些力是偏振相关的。
在等式 1中,我们将指向入射光线方向的Fz分量表示为该条射线的散射力分量Fs。同样地,在等式 2,我们将指向垂直于射线的方向的Fy分量作为射线的梯度力分量Fg。对于复杂形状的光束,如单光束梯度阱中使用的高度会聚光束,我们将光束的散射和梯度力定义为光束各个光线的散射和梯度力贡献的矢量和。图2B描绘了以角度theta;照射球体的会聚光束的单个射线的散射力分量和梯度力分量的方向。可以看出,上面定义的梯度力是守恒(conservative)的。这是由于Fg(射线的梯度力)可以单独表示为rho;的函数,即射线与粒子之间的径向距离。这意味着在任意闭合路径上的粒子所做的功的积分可以表示为Fg (rho;)drho;的积分,这个积分显然是零。如果单个射线的梯度力是守恒的,那么任意光线集合的梯度力是守恒的。因此,几何光学系统中定义的梯度力的守恒性质与瑞利体系中的相同。然而,散射力所做的功总是依赖路径的,在任何状态下都不守恒。可以看出,对于更复杂形状的光束而言,这些新的梯度和散射力定义使我们能够在几何光学和瑞利体系中以相同的方式描述梯度阱的操作。为了得到力的大小,我们计算了散射力Fs,梯度力Fg,以及总力 的绝对值,即使用等式1和等式2的以入射角度theta;的函数。我们认为一个典型的例子是圆偏振光射向有效折射率n = 1.2的球体的情况。 这种圆偏振光线的力是垂直和平行于入射平面偏振的光线的平均力。粒子的有效折射率定义为粒子n2的折射率除以周围介质n1的折射率;也就是n = n2 /n1。水中的聚苯乙烯球有n = 1.6/1.33 =1.2。图4说明了Fs、Fg、和Fmag以theta;为变量的结果,分别为Qs、Qg、
其中:
n1*P/c的量是在折射率n1的折射率介质中每秒钟的入射动量。回想一下,当射线从一个完全反射的镜面垂直反射的情况下,每秒钟n1P/c的射线的最大辐射压力可以推导出为Q = 2。可以看出,对于n = 1.2,对于角度为 theta;= 70°的射线产生0.5的最大梯度力Qmax。表I显示了折射率n对在以入射角theta;gmax处发生的梯度力的最大值Qgmax的影响关系。在表中,同样显示了以入射角theta;gmax时散射力Qs的对应值。当n增加时,Qs值随着Qgmax的增加而持续增长,这表明在高n处实现良好的梯度阱可能存在困难。
梯度阱在球体上的力:
焦点在Z轴上时:
如图2所示,用来计算当会聚光束的焦点f在Z轴上且距离球体中心O的距离为S时球体上所受梯度阱的力。对于轴对称平面偏振输入会聚光束,球面上的总力与对称性考虑的偏振方向明显无关。因此,为了方便起见,可以假定输入光束是圆偏振的,两个正交偏振分量中各有一半的能量。我们将光线以任意半径r和角度beta;进入显微镜物镜的输入孔径,然后使用AT&T 1600 PLUS个人计算机在输入光线的分布上进行数值积分来计算力。如图2所示,从ZY平面上旋转beta;角度得到的垂直平面ZW包含入射光线和球体的法线ň。因此这就是入射平面。我们可以从几何关系R sintheta;= S sinphi;中计算出theta;角,其中R是球的半径。我们取R = 1,因为几何光学极限中的合力与R无关。得到了theta;角,我们首先利用等式1和等式2的两个方程来计算平行和垂直于入射平面的两个偏振分量的Fs和Fg从而得到圆偏振光的Fs和Fg,很明显,合力是轴向的。因此,对于距原点O距离为S时,每个射线对净力的贡献包括负Z分量Fgz = -Fg sinphi;和正Z分量Fsz = FS cosphi;,如图2 B所示。当距离S在原点O下面时,梯度力分量改变符号,散射力分量保持为正。我们在phi;=phi;max=70°(NA = 1.25的水浸泡下的最大会聚角)的情况下到最大半径rmax进行积分。首先我们考虑折射率n = 1.2的球体和均匀填充输入孔径的输入光束的情况。图5显示了反对称梯度力分量,对称散射力分量和总力的大小,分别表示为Qg、Qs和Qt,分别对于上述S和-S(在球体中心以下)的值。球体轮廓如图5所示,供参考。可以看出,捕获力主要限制在球形粒子内。阱的稳定平衡点SE位于S = 0.06处的球体中心的正上方,其中后向梯度力正好平衡了弱前向散射力。在平衡点之外,梯度力在散射力上占优势,Qt在S=1.01和(-S)=1.02的范围内达到其最大值。在球体边缘附近的大净恢复力是因为入射光线大部分都具有大角度theta;和phi;角接近最佳角度phi;=70°。这确保了来自分量Fg sinphi;的大的反向梯度力贡献以及来自分量Fs cos phi;的大大减小的散射力贡献。
光阱沿Y轴时:
我们下一步研究的是焦点f是在球体的-Y轴的捕获力,如图6所示。在附录二中讨论了力计算的详细步骤。图7给出了Qg、Qs、Qt的梯度力、散射力和总力,作为距离Srsquo;的一个函数,从原点沿-Y轴的角度出发,条件与III a相同。对于这种情况,梯度力只有-Y分量。散射力与它沿着的 Z轴正交。在S#39; =0.98附近的值Qt = 0.31时,总力再次达到最大值,此时在Y轴上的角度为小角phi;= arctan Fg /Fs =18.5°。当然,Y轴的力是关于球面中心对称的。
一般情况:光阱处于任意位置:
最后考虑最通常的情况,其中焦点f位于通过Z轴的任意垂直平面中,距离球体原点O在-Y轴方向上的距离S#39;处,以及在-Z轴方向上的距离Srsquo;rsquo;,如图8所示。附录三总结了这种情况下的力计算方法。图10展示了梯度力Qg,散射力Qs和总力Qt的大小和方向,作为焦点f在YZ平面的左半部分上的位置的函数,并且通过镜像对称于 Y轴,这是在整个球体的横截面上。对于均匀填充孔径并且n = 1.2的圆偏振光束再次进行计算。虽然力矢量是在焦点f处绘制的,但必须知道的是,实际的力总是作用于球体的中心。这对所有射线都适用,因此也适用于整个光束。这表明,在一个球面上,光的线性动量是不可能存在辐射压力力矩的。我们在图10A中看到,沿着Z轴和Y轴的精确径向梯度力也非常接近径向(在球体其余部分的平均值2以内)。他的茎源于上半球入射光的径向均匀分布。图10B显示了相当小的散射力(注意比例
全文共10988字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12335],资料为PDF文档或Word文档,PDF文档可免费转换为Word

