英语原文共 19 页,剩余内容已隐藏,支付完成后下载完整资料
使用组合拉曼弹性后向散射激光雷达独立测量卷云中的消光和后向散射系数
摘要:消光的高度剖面和卷云中的后向散射系数独立于弹性和非弹性(拉曼)后向散射信号而确定。给出了扩展的误差分析。提供了覆盖冰云中消光 - 后向散射比(激光雷达比)的测量范围的示例。通常发现5到15sr之间的激光雷达比率。在一个云剖面中可以观察到2到20 sr之间的强烈变化。通过使用Klett方法,将非弹性后向散射信号和弹性后向散射信号确定的粒子消光系数进行了比较。如果激光雷达比率沿测量范围变化,则消光轮廓的Klett解决方案可能是非常错误的。另一方面,简单的后向散射激光雷达可以提供有关云光学深度和平均云激光雷达比的可靠信息。
关键词:组合激光雷达,拉曼激光雷达,背向散射激光雷达,激光雷达比,粒子消光,粒子背向散射,Klett方法,卷云观测。
1.介 绍
高海拔卷云已被确定为地球 - 大气系统辐射平衡的一个重要调节器。{1} 特别是,opti因为这些云所覆盖的区域的增加(可能部分地由凝结尾迹引起)预计会增强温室效应,所以薄的卷云是非常令人感兴趣的。尽管冰云的重要性,他们的微观物理测量关系(冰晶特征)及其辐射特性(消光,反射和发射)是罕见的[1] ,主要是因为它们在大气中的高位置。最近在两个区域实验中进行了卷云的扩展研究,第一个国际卫星云气候学项目(ISCCP)区域实验(FIRE)[2]和国际卷云实验(ICE)[3] 在这两个调查中都是使用了高空飞机和地面观测站。
在本文中,在ICErsquo;89期间在1989年9月和10月的卷云中进行了激光雷达测量介绍。据我们所知,第一次,高层冰云的消光和后向散射系数的剖面是用拉曼弹性背向散射激光雷达相互独立测量的。在所应用的技术中,波长为308nm的短激光脉冲垂直传播到大气中,信号的高度分布由空气分子和粒子(在308nm处)弹性后向散射,而非均匀的(拉曼)由氮分子后向散射记录332nm(振动 - 旋转光谱)。粒子消光系数由非弹性后向散射信号轮廓[4]确定,而粒子后向散射系数是从弹性后向散射与拉曼信号的比率得出的,如组合激光雷达技术中常见的那样。[5-6]
粒子的独立测量ex提示和后向散射系数,因此,消光 -后向散射比,或激光雷达比,提供有关传输和反射的信息由于激光雷达比率,卷云的特性以及冰晶特性等待各种形状,大小和方向热带冰粒。microphysi的影响在此基于测量检验讨论了消光 - 后向散射比的校准特性普莱斯。
激光雷达比是一个重要的输入参数,用于确定粒子消光系数仅来自弹性后向散射信号。【7-10】在这项技术中,源于Hitschfeld和Bordan的雷达应用,【11】 粒子extinc通过求解基本激光雷达方程导出的伯努利方程,得到幂律关系,得到后向散射系数或后向散射系数在气溶胶消光和后向散射之间运输。该技术通常被称为Klett方法,因为Klett8 以便于分析激光雷达观察的方式重新形成了形式主义。蒸发散。该方法被广泛使用,因为大多数激光雷达是弹性后向散射激光雷达。因此,消光 - 后向散射比的测量对于该技术的应用也是有价值的。
此外,后向散射和消光曲线的独立测量提供了机会分析伯努利解的有效性。事实上,灭绝系数的确定来自拉曼信号的客户是获得可靠的卷云消光剖面的唯一方法。这通过比较两种技术在不同消光和后向散射条件下的结果,即对于范围相关的激光雷达比的不同值来显示。
原则上,高光谱分辨率激光雷达(HSRL)技术也可以提供准确的extinc12 这里测量弹性后向散射光的光谱分布,并将窄气溶胶后向散射峰与多普勒展宽瑞利线分开。分子然后使用lar后向散射轮廓来确定粒子消光系数。然而,在现阶段,13抑制了强烈的冰晶散射在瑞利测量通道中是不够的,并且尚无法确定卷云消光剖面。
尽管对于卷云,消光系数的伯努利解是不确定的,但形式可以应用于计算平均云激光雷达比率以及云光学深度。这是恶魔根据cirrostratus测量的结果进行评估。
本文包含六个部分。介绍接下来是激光雷达设备的描述。在第3节中,给出了确定感兴趣量的基本方程式。第4节介绍了扩展的错误分析,这是必要的因为拉曼信号被用于我们所知的第一次全面研究云光学特性的信号。在第5节中,显示和讨论了实验结果。第6节给出了总结。
2.激光雷达仪器
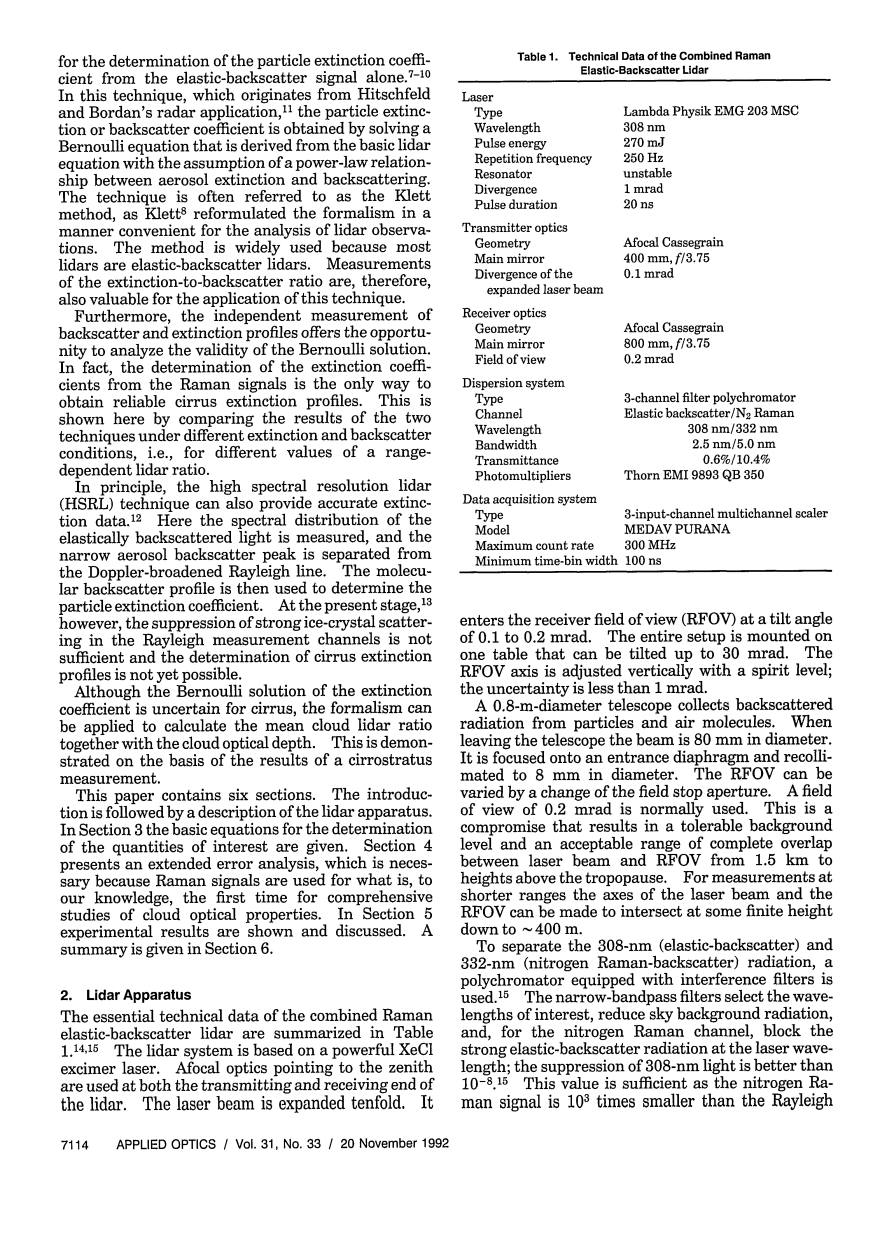
组合式拉曼弹性背向散射激光雷达的基本技术数据总结在表I.i4,i5激光雷达系统基于功能强大的XeCl准分子激光器。指向天顶的非球面光学器件用于激光雷达的发射和接收端。激光束扩大了十倍。它0.1至0.2 mrad的倾斜角进入接收器视场(RFOV)。整个装置安装在一个可倾斜至30 mrad的工作台上。RFOV轴垂直调整,具有水平仪;不确定度小于1 mrad。
直径0.8米的望远镜收集来自粒子和空气分子的后向散射辐射。离开望远镜时,光束的直径为80毫米。它专注于入口隔膜和重新定位配合直径为8毫米。可以通过改变场光阑孔径来改变RFOV。通常使用0.2mrad的视场。这是一种折衷方案,可以产生可容忍的背景水平和激光束与RFOV之间完全重叠的可接受范围,从1.5公里到对流层顶以上的高度。对于较短距离的测量,激光束和RFOV的轴可以在低至约400米的某个有限高度处相交。
为了分离308-nm(弹性后向散射)和332-nm(氮拉曼后向散射)辐射,使用了配备干涉滤光片的多色仪。15 窄带通滤波器选择波感兴趣的长度,减少天空背景辐射,以及对于氮拉曼通道,阻挡激光波处的强弹性 - 后向散射辐射长度;308nm光的抑制优于10-8.15。该值足以作为氮Raman信号比Rayleigh小103 倍后向散射信号和粒子后向散射信号不超过10倍[ 理论] 可以假设大于瑞利背向散射信号。即使在云基区强后向散射的情况下,这些条件总是在X = 308 nm处得到满足,正如我们的测量结果所示。弹性背散射channel被额外的中性密度滤波器衰减,以将其计数率降低到100 MHz以下,即最大值300 MHz系统的死区校正【14-16】保持在合理水平的mum值。
光电倍增管以光子计数模式操作。每个光电倍增管的暗电流小于1计数/秒。计算机控制的多通道定标器以10 MHz的最大采样率记录脉冲,这是相关的直径达到15米的深度。数据采集电子设备由光电模块触发用于检测输出激光脉冲的钳管。对于光电倍增器死区时间校正计数率,并且在白天测量弹性后向散射信号的情况下校正背景噪声。为了确定平均天空背景,采取了从16到18km之间的高度范围的数据。在夜间,两个测量通道的背景水平都可以忽略不计。
在ICE89的野外活动期间,后向散射信号以60米的高度间隔累积,最高可达18公里,时间间隔为1分钟或更长。组合拉曼弹性背向散射激光雷达的位置位于北海的诺德奈岛(东经7°13,E,北纬53°43N)。激光雷达是由四个地面激光雷达站组成的中尺度网络的一部分,这些激光雷达站安排在德国海湾内和周围。17 伴随收音机在诺德奈也制造了探空仪,以获得实际的温度和压力曲线。
如上所述,re的垂直指向在iCE89期间选择了ceiver光学器件。如果镜面反射,这似乎不是研究卷云散射和消光特性的最佳选择通过水平取向的冰晶发生。关于该问题的细节在第4节和第5节中给出。测量条件由以下事实确定:极化激光雷达在常规基础上测量去极化比率是网络的成员。据信,如果这个激光雷达看起来垂直,可以获得最有趣的结果。因此,所有四个激光雷达都指向天顶,以使网络的结果相当。此外,我们相信en只有在这些条件下才能观察到卷积消光 - 背散射比的轮胎范围。
理论
308nm处的弹性后向散射信号和332nm处的氮非弹性后向散射信号的测量允许确定消光和后向散射系数彼此独立,并因此确定消光 - 后向散射比。
弹性后向散射的基本激光雷达方程:
对于氮气拉曼背向散射信号:
这里PXo 是从距离2接收的功率:分别在激光波长 和拉曼波长Xr。0(z)是激光束RFOV重叠函数,其对于高于最小测量高度z分 的高度是一致的,高于该最小测量高度z分 激光束与接收器的视场完全重叠。KX(j和KXr 包含所有与深度无关的系统参数ETERS。Nr(z)是氮分子数density,do ^ TiO / dfl是向后方向的与范围无关的差分拉曼截面,3x0mo1 和3x0aer 是由瑞利和粒子散射引起的后向散射系数。系数a肖伊Rmo1 和axq,x赖尔 描述了extinc这是由于大气中的吸收和瑞利散射以及激光和气溶胶消光对激光和拉曼波长X0 和Xr的影响tively。
已经进行了若干尝试来推导出颗粒消光系数或气溶胶透射率直接来自已知密度的气体(例如“氧气或氮气”)的测得的拉曼信号分布。[308nm处的弹性后向散射信号和332nm处的氮非弹性后向散射信号的测量允许确定消光和后向散射系数彼此独立,并因此确定消光 - 后向散射比。
弹性后向散射的基本激光雷达方程],【18-21 】如前所示,4 可以从硝基获得颗粒消光系数gen拉曼信号通过Eq。(2)通过使用oix0moKz) - Oi卡尔莫Kz)laquo;x0aer(2)其中假设粒子散射为propor至X~k。用于气溶胶颗粒和水滴让直径与测量值相当在波长的情况下,灸= 1是合适的,而在冰粒的情况下,通常比激光波长大,々= 0是合理的。【22】 空气密度和瑞利散射和臭氧吸收系数必须是已知的为了阻止方程式中Nr(z)和Xo,XRmol(z)的缩写。(3)。空气密度和瑞利散射系数是根据温度的实际无线电探空仪数据确定的
如果有的话,或者从符合测量的地面温度和压力值的标准大气模型中获得真空和压力。臭氧吸收从测量的吸收估计系数横截面23 和中纬度夏季条件下的臭氧密度模型。24
粒子后向散射系数P aer(2r)可以通过使用弹性和非均匀后向散射信号来确定。5,[对于 = 308 nm at,后向散射比小于0.01] [midlatitudes。25 然后只有空气密度,分子] [ular后向散射和大气消光道具] [必须估计erties来解决Eq。(4)。这个可以] 两个测量的信号需要在高度z和参考高度Zq处的最佳对PXq 和PXr 。从两个激光雷达方程[见Eq。(1)]对于弹性后向散射信号P (z)和i (2:0)和两个拉曼激光雷达方程[见方程式1]。(2)]对于Pxr(z)和Px (zo),粒子的解决方案通过形成比率获得散射系数P 10aer(2)
插入四个信号的相应激光雷达方程,并重新排列所得方程。解决方案是:
通常选择参考高度z0 使得3x0mol(2:o)raquo;3x0aer(^ o),使得3x0aer(20) 3x0mol(2)0) - P入奥莫尔(20)。这些晴朗的空气条件通常在对流层上层盛行。在高海拔地区,粒子到瑞利的背景水平 z0 和z之间的高度范围的sion比由测量的粒子消光系数确定[见方程式1]。(3)]假设波长依赖于A.-1 低于云和水云,并且在卷云中没有波长依赖性。
在整个对流层中具有高粒子负荷的情况下,在ICEj89期间没有发生的情况,在等式2中的值Px0aer(z0)。(4)是必要的。由于粒子消光与后向散射比SXoaer(zo)= c ^0aer(z0)/ Px0aer,因此无法从确定的粒子消光系数中以足够的精度估计该量。 (20)不太清楚,即使使用不同气溶胶类型26 的该参数的公开数据。在这种特殊情况下,从方程式确定后向散射剖面。(4)是不可能的。但是,这种情况很少发生。即使在山的强烈喷发之后皮纳图博于1991年6月,结果en通过对流层气溶胶含量和下沉颗粒穿透对流层顶,5公里以上的对流层通常是干净的,正如我们的测量所示。
最后,激光雷达比的高度剖面:
Px0aer(^)可以从aer(2)和〜卿⑵的分布获得,如式(1)所示。(3)和(4)。
在目前的实验设置中,拉曼激光雷达应用仅限于夜间,因为只有在没有强日光背景的情况下才能检测到弱的非弹性后向散射信号。对于卷云的白天观测,只能使用弹性后向散射信号。因为这个原因,反演方法7-10 的适用性的分析用于测定卷云散射特性在下面的部分中给出,利方粒子消光系数方面的解可以写成
对于 = 308 nm at,后向散射比小于0.01midlatitudes。25 然后只有空气密度,分子ular后向散射和大气消光道具必须估计erties来解决Eq。(4)。这个可以* S mo1 =(8W3)sr和lt;Sx0aer(2;)是Rayleigh和粒子散射的消光 - 后向散射比分别是。必须估算激光雷达比SXoaer(z),并且对于有利的条件,可以从文献中获得。26 z0 是参考或校准 -粒子消光系数的高度cient aXoaer(z0),即整数的边界值除了粒子激光雷达比S科埃(z)之外,还必须估算。原则上,等式(6)可以从校准高度zq开始积分,校准高度z可以是近端(zgt; z0,正向积分)或测量范围的远端(2) lt;z0,向后整合)。数值sta然而,只有在向后积分的情况下才能给出不被误认为准确性的能力。8 等式(6)仅假设粒子和射线leigh散射。在施加Klett方法之前,必须校正臭氧吸收,其在 = 308nm处不可忽略。瑞利散射和臭氧吸收系数通过使用标准模型假设以上述方式确定tions或测量数据。
然后从等式1获得粒子后向散射系数。(6)通过将所得消光系数aXoaer(^)除以之前用于求解等式1的激光雷达比Sx0aer(z)。(6)。
错误分析
三个不确定性来源决定了用方程式计算出的参数误差。(3) - (6):由信号或光子
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18375],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 气候系统模式BCC_CSM1.1对东亚高空对流层急流和相关瞬变涡流活动的模拟外文翻译资料
- 基于FAO Penman-Monteith方程与每日天气预报信息估算参考蒸散量研究外文翻译资料
- 稳定非饱和渗流条件下的无限大边坡稳定性外文翻译资料
- CMIP5模式下中国极端降水指数。第二部分:概率投影外文翻译资料
- 2013年2月8-9日东北部地区暴风雪过程的偏振雷达和微物理过程研究外文翻译资料
- 华南前汛期香港中尺度暴雨的研究外文翻译资料
- 边界层对极地春季臭氧损耗现象起止的影响外文翻译资料
- 一种利用神经网络从具有高光谱分辨率的红外光谱 反演温度信息的方法外文翻译资料
- 1961 ~ 2004年青藏高原夏季降水的时空分布外文翻译资料
- 中国中东部地区冬季雾——霾日的年际变化及其与东亚冬季风的关系外文翻译资料

