英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
分隔距离、航速和航道尺度对船舶操纵性的影响
摘 要
我们使用基于系统的方法对受限制的内河航道内船舶操纵性进行研究,该方法采用了非线性动力学模型和限制模型考虑到航道河岸和底部的影响,该船舶操纵模型由旋回圈测试进行了验证,且该限制模型通过实验数据进行了验证。利用分隔距离、船速和航道宽度等不同组合的变化研究他们对船舶操纵性的影响。当分隔距离小且以较高的航速在河岸附近时,船舶的轨迹偏离初始的航向更多,船首以较大的偏航角被推开,从而提高了船舶操纵的难度。更小的航道宽度使得船舶推动的阻力更大。研究表明在受限航道航行时,应在航道中间行驶,并保持合理的速度。
- 介绍
在内陆运输的过程中,不可避免的会在水动力相互作用至关重要的受限区域操纵船舶。当船舶开始驶进河岸时,船首就会被河岸推开,这被称为船首靠垫,船身将被吸到河岸,称之为岸吸效应。如果这些因素达到一定的地步,船舶就会变得很难控制,可能会导致海上事故发生,比如碰撞和搁浅。因此,研究船舶在受限制的水域的操纵性具有重要意义。
船舶操纵性的研究历史悠久,至今研究人员仍然在继续研究。通过使用限制模型和一些数学方法,可以早期确定水动力系数。然后基于系统的模型的仿真以预测船舶操纵性能。与实验方法和CFD(计算机流体力学)方法相比较,在PC(个人电脑)上进行一次免费运行实验只需几分钟。这在船舶设计的初步评估过程十分有效,只要模型和系数足够的精确,结果就会很满意。人工神经网络([1,2])、支持向量机器[3]和优化技术([4,5])已经被用于识别船舶水动力导数和模拟船舶操纵。通过使用这些技术,船舶参数可以被优化并且进行高精度的模拟操纵。
已经使用基于系统的方法对在限制水域的船舶操纵性能进行了一些工作。Lee和Lee[6]研究了船岸相互作用中的船舶操纵。结果显示,当船舶接近锲型河岸时,由于侧倾力和弯曲力矩的共同作用,可能会遇到危险的碰撞趋势,lee的另一个工作评估了在狭窄水道的船舶之间的安全航行。结果显示较小的船舶受船舶间的相互作用的影响更大,并提出了合适的安全船速和距离。使用更先进模型,可以提高此方法的精度,并且得到更实际的结果。
在本文中,使用基于系统的方法研究船舶在指定水道的操纵性。在非线性操纵中,将航道河岸和底质的影响作为外力实现。改变分隔距离、船速和航道尺度可以研究限制对船舶的航迹和偏航角的影响。根据这些因素确定船舶和河岸的最小距离,以定量表征受限水路的船舶航行。
- 操纵方程
2.1非线性瞬态水动力学模型
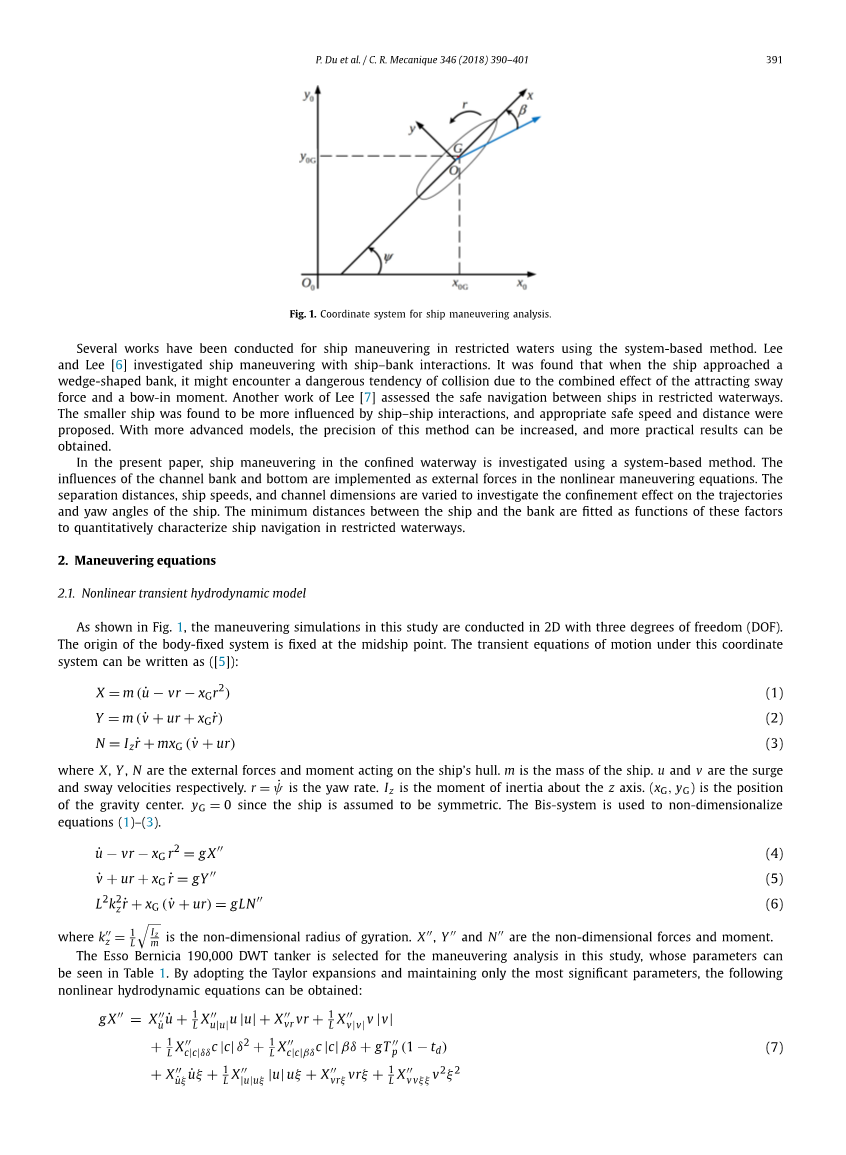
如图一所示,本研究的操纵模拟具有三个自由度(DOF)的2D中实施。身体固定系统的原点固定在船中点。在该坐标系下的瞬间运动方程可以被写成:
X,Y,N是作用在船体上的外力和力矩。m是船舶的质量,u和v是纵荡和横荡速度,r= ̇psi;是偏航角,Iz是关于Z轴的转动惯量,(xG,yG)是重心的位置,yG=0,因为假设船舶是对称的。Bis系统用于无量纲方程(1)-(3)
k′′z=1Lradic;Iz/m是无量纲回转半径,X′′,Y′′和N′′为无量纲力和力矩。
选取伯尼西亚190000吨邮轮进行操纵分析,它的参数见表1。通过采用泰勒展开式和保留最重要的参数,可以获得下列的非线性水动力方程:
X′′ ̇u,X′′u|u|,...是无量纲水动力导数。这项工作中使用了[8]中的最优化值,它的各个值见表2,g,delta;,td和beta;是重力加速度,舵角,推力减少系数和漂角。xi;=T/(hminus;T),h和T是水深和船舶吃水深度。无量纲螺旋桨推力T′′和舵上C处的流速度被给出来:
其中,Tuu,Tun和T|n|n是螺旋桨的水动力系数。Cun和Cnn是舵的水动力系数。n是转速。可以建立方程(4)-(6)和方程(7)-(9)的关系,然后可以求解船舶运动参数u,v,x,y,psi;,delta;,n等。
2.2限制作用的公式
限制作用被当作作用在船体上的外力和外力矩,可以直接包含在方程
(4)-(6)的RHS(右手边)。在计算中采用模型[9],他们被分解成如下形式:
上面的H表示前进速度的影响,P表示船舶推进速度的影响,HP表示前进速度和推进速度的耦合影响。Vantorre的模型缺少纵向力XB的表达式,在接下来将会介绍到。等式(12)中的RHS项被写成:
rho;是水密度。alpha;Hik,beta;Hik,alpha;Pik,beta;Pik,alpha;HPik,beta;H是回归系数,在[8]可以看到。Fr是基于船舶长
度的弗劳德数。heff=hminus;zm是航道的有效深度,h和Zm分别是由于深
蹲效应,水深和平均下沉。Vt是参考速度,定义式是:
其中Tp是螺旋桨推力。D是螺旋桨直径。yB和yB3是无量纲船岸距离,定
义式是:
Yp,yp3,ys,YS3的定义见图2。注意,船与岸之间的距离,即在右舷的最初船岸距离在下面的研究中,是指ys。当使用Vantorre模型时必须遵守一些限制。船舶的几何结构应该满足:0.56lt;CBlt;0.84,6.0lt;L/Blt;7.3,h/Tdgt;1.07。如果在下面的范围这个测试情况会更好:0lt;Frlt;0.081,0lt;yB3lt;0.79。
关于纵向力,我们在这里采用Lataire模式[10].
其中alpha;x是来自实验的回归系数.nabla;是船舶排水量.Tum(u)是改变的塔克数字。
Frcrit=(2sin(arcsin(1minus;mb)/3))1.5是临界弗劳德数([11,12]). Frh是与水深有关的
弗劳德数。mb和meq是经典和等效堵塞,定义式是:
Aship和Achannel是航道的中间面积和横截面积。横截面X的加权系数可以被计算为:
下标s和p代表船舶的右舷和左舷。加权系数的定义可以见图3。近贴船舶的位置对应于较大的限制作用。alpha;y和alpha;Z是从实验中得到的回归系数。yb是影响距离,可以描述为开阔水域和密闭水域之间的边界,可以计算成:
船舶航行距离大于yd的船不会遇到明显的岸壁效应。在这片论文中,回归系数可以通过由比利时列日大学“建筑导航与交通系统(ANAST)”研究人员完成的拖船实验计算出来。
- 船舶操性能的验证
3.1旋回圈测试
使用标准的旋回圈实验验证了在2.1节中的操纵模型。船舶参数见表3,模拟结果见图4。可以看出,轨迹、浪涌速度和偏航角与实验数据([5])一致,证明了该方法的有效性。非线性瞬间流体力学模型在这项工作中。
3.2约束模型的验证
船舶的控制参数见表4。详细的实验设置在Norrbin[13]的原始论文中给出。实验结果和模拟结果的比较见图5。一致性证明本研究的约束模型实验的有效性和正确性。由于增加了纵向力XB,与Du等人的工作比较,我们的实验结果得到了很大的改善[8].在下一章节,将更改船岸距离和船舶速度,研究它们对船舶的操纵性能上的影响。
4.结果和讨论
本节考虑三个情况,分别改变分隔距离、船速和航道宽度。详细的参数见表5。根据ITTC报告[14],当水深低于1.5倍的船舶吃水时,航道底部的影响就会变得很明显,这也会影响到浅水效应。事实上,当h/Tlt;([15])时候,可能已经注意到深度限制。在这里,h/T=1.38,意味着设计航道在浅水中。在这个研究中,影响距离yd是274.3米(方程式(29))。所以表5中航道的设计是完全受限的。在这些条件下进行以下研究。
情况1:分隔距离的影响
分隔距离是指船舶和航道底部边缘Ys的最初距离(见图2)。船舶的航迹和偏航角见图6。船舶首先由于岸吸效应被吸到河岸。可以从偏航角增加上看出来,船首被岸垫推开。当推进力和船岸相互作用引起的排斥力大于河岸吸引力,船舶将会被推离河岸。当分隔距离很小时,岸壁效应就会变得更明显,船舶将会被吸引到离河岸更近的位置。弯曲效果更大,产生更大的偏航角。
船舶的航迹也与Du等人的工作相比较[8](图7),其中案例设置相同,只是在此研究中考虑了纵向力。可以看到纵向力会降低船舶速度,从而削弱岸壁效应。
计算出来最小到河岸的距离来表示它与分隔距离的关系。通过忽略船舶的曲率并假设形状是矩形,最小位置应该位于船尾的底部拐角(见图8)。分隔距离Ys是从中点到航道底部边界的距离,应将其转移到船尾,然后:
在这里beta;b=psi; alpha;b.alpha;是由长度Lpp和船梁B所决定的。psi;是偏航角见表6。由于河岸是倾斜的,真正的最小距离应该是:
其中B2=(h-T)/tanalpha;。最小距离计算见表9。可以观察到最小距离随着分分隔距离的增加而增加,这与真实情况相对应。应注意的图6中船舶的航迹是基于船舶中点,并没有考虑到船舶的几何形状。总之,船舶应该调离河岸。在限制水域,最好是使船舶行驶在航道中间。为了定量描述这些结果,基于在表9的数据就可以得到一个回归方程。
测定系数(R2)是0.9988,表示拟合质量良好。这个方程展示了最小距离和分隔距离的弱二阶多项式关系。
情况2:船速的影响
为了调查在限制水域船舶操纵性能的影响,船速的变化的。正如表5所展示的,设计了从1.0节到8.0节的速度,在实际情况下覆盖范围广。船舶轨迹和偏航角见图10。低速船舶会使船舶的船岸相互作用变小,与原航迹的偏移也变小。当船舶速度增加时,船首以大角度偏航而被推开。
还计算了河岸的最小距离,以证明它与船速的关系。数据和拟合曲线见图11,拟合公式是:
测定系数(R2)是0.999。当船舶速度较高时,船舶就会有大的船岸相互作用。随着船首被推开,船舶将会被推离岸边。所以最小距离将会随着船速的增大而增加。然而,当船速过快时,船舶的操纵性能将会改变并且船舶的控制会变得困难。此外,与河岸相撞的潜在力量将会增加。因此,当船舶在河岸附近航行时,应该评估到河岸的最小距离和操纵难度,以防止可能发生的事故。
情况3:通航宽度的影响
在这种情况下,将研究航道尺度的影响。船舶和航道的详细的参数可以见表5。水道的宽度从100米到300米不等,而河岸斜坡、水道的高度和水深保持不变。船舶以相同的分隔距离(在水道中ys=35 m),初始船速为8.0节,舵角为0度。
船舶的航迹和偏航角见图12。当航道宽度很小,两边河岸的影响趋向于对称并且相互抵消。船舶航行不会发生强烈变化并且船舶倾向于保持原始航向。尽管这对船舶航行有好处,但在密闭水道的操纵空间是有限的。航道的限制范围随着航道宽度的减少而变大,这在船舶上引起较大的纵向阻力。如图13所示,船舶的前进速度显著下降。
最小船岸距离和航道宽度的关系见图14。最小距离随着航道宽度的增加而减少。在这种情况下,分隔距离是固定的,航道宽度是可变的。所以岸壁效应的非对称性在船舶和河岸间的最近位置出现起着十分重要的作用。拟合公式如下:
5总结
在本文中,船舶操纵方程式中实现了约束效果的模型,约束效果被认为作用在船体的外力和外力矩。数值结果和实验数据吻合良好。
使用这个方法,研究了分隔距离、船舶速度和航道宽度不同的情况下,船舶在在密闭水道的可操纵性。到河岸的最小距离是含有三个参数的函数。计算较小分隔距离使船舶与原航向偏差较大,此外,靠岸垫的俯冲效应更加明显。建议操纵船舶远离河岸(如果处于密闭水道,在航道中间),这与实际情况想对应,船速的影响不如分隔距离明显。最小船岸距离展示出与船速有关的多项式关系。较小的航道宽度有利于保持原始路线,因为两个河岸的影响相互抵消。但是,这种限制会在船上引起很大的纵向阻力,从而大大降低了船的航行速度和费用。应在效率和安全上进行折衷,如果效率更高,可以选择更高的速度,并且船舶在航道中间操纵。相反,如果安全更重要,则可以通过降低船舶速度,而船舶的操纵性不发生剧烈变化,即便如此,这些变化也很容易被舵的作用抵消。
致谢
第一作者感谢中国奖学金委员会(CSC)对其的经济支持。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[241404],资料为PDF文档或Word文档,PDF文档可免费转换为Word

