英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
外文翻译
潘若冰
考虑边坡稳定性要求的钢筋混凝土悬臂式挡土墙优化设计
摘要
悬臂式钢筋混凝土挡土墙(RCCRW)是工程实践中常用的挡土结构之一。为获得悬臂墙的优化设计,提出了各种优化技术,其中通常考虑了倾覆、滑动和承载破坏三个基本岩土约束条件。然而,这些方法都没有考虑边坡稳定性的岩土工程要求。本文中描述了一种用于RCCRW优化设计的新型构想,该构想考虑了倾覆,滑动,承载和斜坡失效的岩土稳定性的更完整要求。材料的最低成本、墙体失效的土工技术限制(倾覆,滑动和承载)以及墙体部分中钢筋的结构要求的目标函数都遵循以前工作中使用的传统方法。使用具有圆弧破坏面(CAFS)的普通切片方法(OMS),可以得出RCCRW的斜坡失效安全系数(FSOMS)。在制定过程中,实施了确保最低FSOM高于要求系数的约束。设计变量是墙截面尺寸、相应的钢筋和CAFS中心的X-Y坐标,后者是新公式中的附加未知量。通过将其应用于RCCRW的两个示例的优化设计,证明并验证了所提出的优化方法的计算性能。
关键词:优化,优化设计,挡土墙,岩土稳定性,结构安全性
一.导言
在工程实践中,钢筋混凝土悬臂式挡土墙(RCCRW)是抵抗土的侧向土压力的常用结构之一。它通常用于在一个地形区域的两个不同海拔之间支撑土壤,如山坡、农业、道路立交桥等。此外,RCCRW还可作为河岸的保护系统或抵抗地面超载。这种类型的墙壁传统上由普通或钢筋混凝土构成,后者在实践中更为常见。RCCRW的传统设计过程是一个迭代过程,分别考虑钢筋混凝土的岩土分析和结构设计。通常,设计者会假设某些尺寸,然后修改试验部分,直到完全满足岩土稳定性要求。然后,进行RCCRW的钢筋的设计。然而,这种传统的设计方法可能不是成本最优的,而是高度依赖于设计师过去的经验。
首先采用优化技术来获得RCCRW的最优设计(Rhomberg 和 Street,1981),随后将其制定为具有七个几何和钢筋设计变量的约束非线性规划,并通过专门准备的程序求解(Saribas和Erbatur,1996)。在公式中,考虑了十种墙体破坏模式(倾覆、滑动、偏心、承载力、剪力和趾板、踵板和墙杆的弯矩)。从那时起,已经研究了大量关于RCCRW优化设计的研究,其中考虑了优化设计的各个方面。例如,Sadoglu(2014)提出了一种优化设计,用于对称重力挡土墙的优化设计。提出了一种无网格方法来模拟钢筋混凝土结构的复杂断裂行为,该结构考虑了任意裂缝萌生和裂缝扩展(Rabczkuk和Belytschko,2006; Rabczuk等,2008)。这种复杂的数值方法适用于具有中等到严重裂纹和可变形界面的非线性问题(即允许不同区域之间的相对位移)。Castillo等人(2004)和Sivakumar和Basha(2008)提出了一种基于可靠性的RCCRW设计优化方法,其中输入参数在其分析中被视为随机变量。Ghasemi等人(2014年,2015年)采用了基于可靠性设计优化的替代方法来研究设计参数(即几何,材料和模型)中不确定性的传播及其对聚合物纳米复合材料连续体可靠性的影响 结构和纤维增强复合结构。不同的元启发式搜索算法被称为全局优化算法,广泛应用于RCCRWS的优化设计,包括模拟退火(Ceranic等人,2001;Yepes等人,2008)、粒子群优化(Khajehzadeh,2010)、和谐搜索算法(Kaveh和Abadi,2011)、蚁群优化(G。Hazavi和Bazzazian,2011年),《大邦大危机优化》(Camp和Akin,2012年),多目标遗传算法(Kaveh等人,2013年)、混沌帝国主义竞争算法(Pourbaba等人,2013年)、引力搜索算法(Khajehzadeh和Eslami,2012年;Khajehzadeh等人,2013年)、增强型带电系统搜索算法(Talatahari和Sheikholeslami,2014年)、各种基于群体的智能技术的参数研究(Gandomi等人,2015年)和基于教学的优化(Temuuml;r和Bekdas,2016年)。最近,一种考虑短期和长期稳定性的连续基础优化设计实用方法被提出(Ukritchon和Keawsawasvong,2016年)。
在上述所有研究中,RCCRW的最优成本设计问题被表述为约束非线性规划(NLP),其中设计变量是墙的尺寸和钢筋,这些变量受到岩土和结构要求的非线性约束。如前所述,以前的大多数工作都集中在不同的优化算法上,以便为这个问题找到更好和有效的解决方案。墙体破坏的岩土稳定约束对碾压混凝土结构优化设计具有重要的控制作用。以往的研究都考虑了三种基本的岩土破坏模式:倾覆破坏、滑动破坏和承载破坏。然而,除了这些破坏机制外,边坡破坏也是RCCRW可能发生的一种重要破坏模式,当施加的剪应力大于土壤的动剪切阻力时,挡土墙下方会出现潜在的剪切破坏面。事实上,在所有先前的RCCRW优化设计公式中,对边坡破坏的岩土工程约束并没有得到解决,这是它们的主要局限性。因此,在获得RCCRW的优化设计结果之后,仍然需要进行单独的边坡稳定性分析。如果边坡破坏的最小安全系数不满足岩土工程要求,则优化设计的结果无效。本文提出了一种新的边坡稳定性优化设计方法,该方法考虑了抗倾覆、滑动、承载和边坡破坏的完整岩土工程要求,并考虑了挡土墙各截面钢筋的结构考虑。墙破坏的三个基本岩土约束(倾覆、滑动和承载)、所需的结构约束(剪切力和弯曲力矩)和最低材料成本的目标函数,与先前研究中使用的相同。采用带圆弧破坏面(cafs)的普通切片法(oms;fellenius,1936)以隐式形式定义边坡破坏安全系数(fsoms)。在建议的公式中,实施了确保最低FSOM高于要求值的约束。设计变量包括挡土墙各部分的尺寸、相应的钢筋和CAFS(CCAFS)中心的X-Y坐标。后者是这一新公式中的新未知数。通过使用两个基于梯度的优化求解器将其应用于两个RCCRW实例的优化设计,证明并验证了所提出的优化方法的计算性能。
二.公式
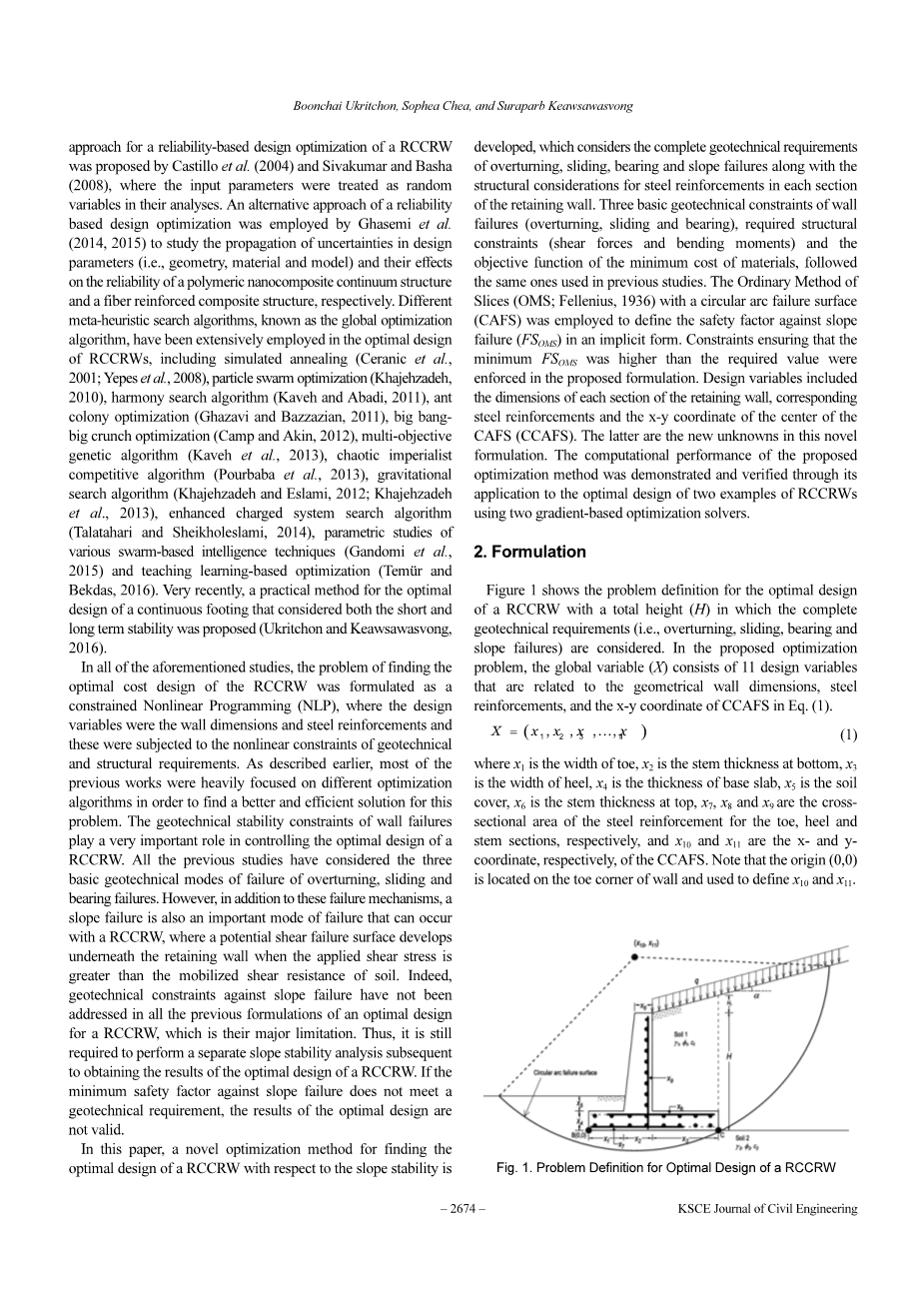
图1显示了总高度(h)的RCCRW优化设计的问题定义,其中考虑了完整的岩土工程要求(即倾覆、滑动、承载和边坡破坏)。在所提出的优化问题中,全局变量(x)由11个设计变量组成,这些设计变量与几何墙尺寸、钢筋以及等式(1)中CCAFS的x-y坐标有关。
) (1)
式中,x1为趾宽,x2为底部杆厚,x3为跟宽,x4为底板厚度,x5为覆土,x6为顶部杆厚,x7、x8和x9分别为趾、跟和杆段钢筋的横截面积,x10和x11分别为X和Y坐标。中央结算系统的活动。请注意,原点(0,0)位于墙的趾角,用于定义x10和x11。
图1。RCCRW优化设计的问题定义
在本研究中,目标函数与Castillo等人的目标函数相同。(2004年)并尽量减少碾压混凝土的材料总成本,包括混凝土、钢筋和模板的总成本。材料总成本的目标函数在等式(2)中定义。
(2)
其中、和分别为混凝土、钢筋和模板的单位成本,为混凝土体积,为钢筋重量,为模板面积。
RCCRW优化设计的设计约束条件包括岩土稳定性标准和结构要求。考虑了四个岩土稳定性要求,即(i)倾覆,(i i)滑动,(i i i)承载力和(iv)边坡稳定性。前面已经报告了前三个基本约束的详细公式(Sivakumar Babu和Basha,2008年),因此本文仅描述了实施边坡破坏约束的程序,这代表了新的实施。核心岩土工程约束1-3总结如下。
从图2可以看出,抗倾覆失效安全系数(FSov)可以写为关于前束角的阻力矩(MR)(即(0,0))与关于同一点的驱动力矩(MD)之和的比值,并且必须等于或大于fsov的要求值,如等式(3)所示。
(3)
抗滑破坏安全系数(fssf)可表示为水平抵抗力(fr)与水平驱动力(fd)之和的比率。水平抵抗力有两种选择。第一种方案考虑墙趾侧的被动力(pp),另一种方案忽略了这种被动力。fssf必须等于或大于所需值(fssd1、fssd2),并由eq表示。(4)和(5)。
滑动类型1 (4)
图2。作用于RCCRW的力
滑动类型2 (5)
针对轴承故障的岩土工程要求产生四个约束。第一和第二个约束规定,合成垂直力(v)必须位于墙基的中间三分之一范围内,因此其下方的拉伸应力不会产生,如等式所示(6)-(8)。
(6)
(7)
(8)
式中=从底板趾角到合成垂直力的距离,b=x1 x2 x3(墙基总宽度)。
与轴承故障相关的第三个约束是直接定义的,这样,由底板趾角处极限轴承压力()与最大接触压力()之比定义的轴承故障安全系数必须等于或大于要求值(),如(9)所示。
(9)
与轴承故障相关的最终约束是在极限承载压力()的计算中强化汉森深度因子的浅基础条件,使得土壤覆盖深度与有效基底长度的比值等于或小于1,如公式(10)所示。
(10)
其中(从墙基中心测量的偏心距)
对于所提出的优化问题,采用OMS(Fellenius,1936),即Fellenius法或Swedish Circle法推导,如图3所示,选择OMS的主要原因在于其简单性,即假定所有切片的切片间力的合力与切片的底部平行。在计算中被忽略。因此,可以直接计算,而无需在其他切片方法中执行迭代计算,如bishop方法(bishop,1955)。此外,如本节下文所述,直接计算有助于实现最小的约束条件。
图3。用于RCCRW优化设计的OMS
在推导时,假设CAFS正好穿过底板的后角,并且不与任何混凝土基础相交,如图3所示。这一假设是通过使用Autoslope(2004年)(Ukritchon等人,2004年)、使用极限平衡法和切片法(MOS)的边坡稳定性软件对悬臂挡土墙的不同几何结构进行广泛研究得出的。研究发现,对于一般的悬臂式挡土墙而言,与最小自由流速度相对应的临界自由流速度具有这一特点。任何不经过那个角落的咖啡馆都不会产生最低的食品安全标准。这一重要发现是合乎逻辑和有效的,前提是墙底部的土壤具有恒定的抗剪强度特性,且其下方没有软弱土层。在OMS计算之后,RCCRW的fsoms表达式可以写成等式(11)。
(11)
式中(总法向力),n为片数,为每片的总重量,q为分布线荷载,为每片的宽度,为边坡回填土的角度,为每片基底的倾斜度,为每片基底的孔隙水力,和为每片地基的粘聚力和摩擦力。每个层面的底部,是每个层面的底部长度,R是CAFS的半径,是从CCAFS测量到每个层面中心的水平距离。
与三个基本岩土工程约束不同,不能明确推导,因为必须对所有切片执行求和操作。因此,系数是作为一种隐式形式获得的,并且是壁尺寸(即x1,hellip;)的函数。X6)、CCAFS(即x10、x11)和其他输入参数。然后,它被限制为等于或高于所需值(),如等式(12)所示。
(12)
式中h为墙的总高度,分别为1号和2号土的单位重量、粘聚力和摩擦角。
为确保中央结算系统符合最低金融服务市场,必须分别使用函数的一阶导数和二阶导数来执行最佳化的必要和充分条件。前两个等式约束与函数的第一个导数(即必要条件)有关,并针对存在极值(最大值或最小值)而强制执行。因此,相对于CCAFs(x10,y11)的一阶导数必须为零,如等式所示。(13)和(14)。
(13)
(14)
此外,其他两个等式约束与函数的二阶导数(即充分条件)有关,并被强制确定一个极值为局部最小值(即最小)。首先,函数的第二个偏导数称为的hessian矩阵(h(x10,x11)),如等式(15)所示。
因此,利用极值为局部极小值的充分条件来加强黑森矩阵的正确定性。或者,可以通过强制H(x10,x11)的平方子矩阵的正确定性来实现,如等式所示。(16)和(17)。
其中tol是公差(10-3)。
这四个强制约束(即,方程(13)-(17))相当于在常规边坡稳定性分析中对关键CAF(即最小当量)的全局搜索,在该分析中,它被约束为始终通过底板的后角。使用这些约束的主要优点是,全局搜索在关键中心为连续变量(x10,x11)的优化模型中自动执行,而不是像在典型边坡稳定性分析中的网格搜索那样成为离散变量。
由于的显式形式不可用,由于其数学复杂性,因此eq中函数的一阶和二阶导数是不可用的。(13)-(17)使用有限差分格式计算,中心差分使用五个点(即I=minus;2、minus;1、0、1和2),即四阶精度(Fornberg,1988),如等式所示。(18)-(22)。
表1 五点中心差系数,四阶精度(Fornberg,1988)
|
导数 |
全文共8199字,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[1143] |

