英语原文共 19 页,剩余内容已隐藏,支付完成后下载完整资料
在没有明确的左转的信号交叉口运用增强元胞传输模型对交通运行建模
摘要
本文提出了一种增强的元胞传输模型(CTM)来捕获信号交叉口的交通运行,而不需要明确的允许左转弯让行规则。在许多发展中国家可以广泛观察到的,侵略性的左转弯车辆不一定会给对向直行让行。不同于以往的研究侧重于驶入道路的交通动态,本研究有助于在交叉口的交通运行建模。提出了一种基于多种虚拟小区的新型小区传输框架,用于模拟交通流从入口到出口的动态变化。模拟了左转弯与对向直行过动作冲突点的竞争占据的独特现象。提出了阻塞状态的胞元状态,用以捕获动态车辆排队的形成和耗散,并对交叉口处的运行交通性能进行评价。现场验证结果表明,与传统交通流模型相比,该模型能较好地捕捉信号交叉口的交通运行,且不需要明确的左转许可规则,具有较高的精度。
关键词:细胞传播模型;冲突;允许左转弯通行;信号交叉口;交通运行
1.介绍
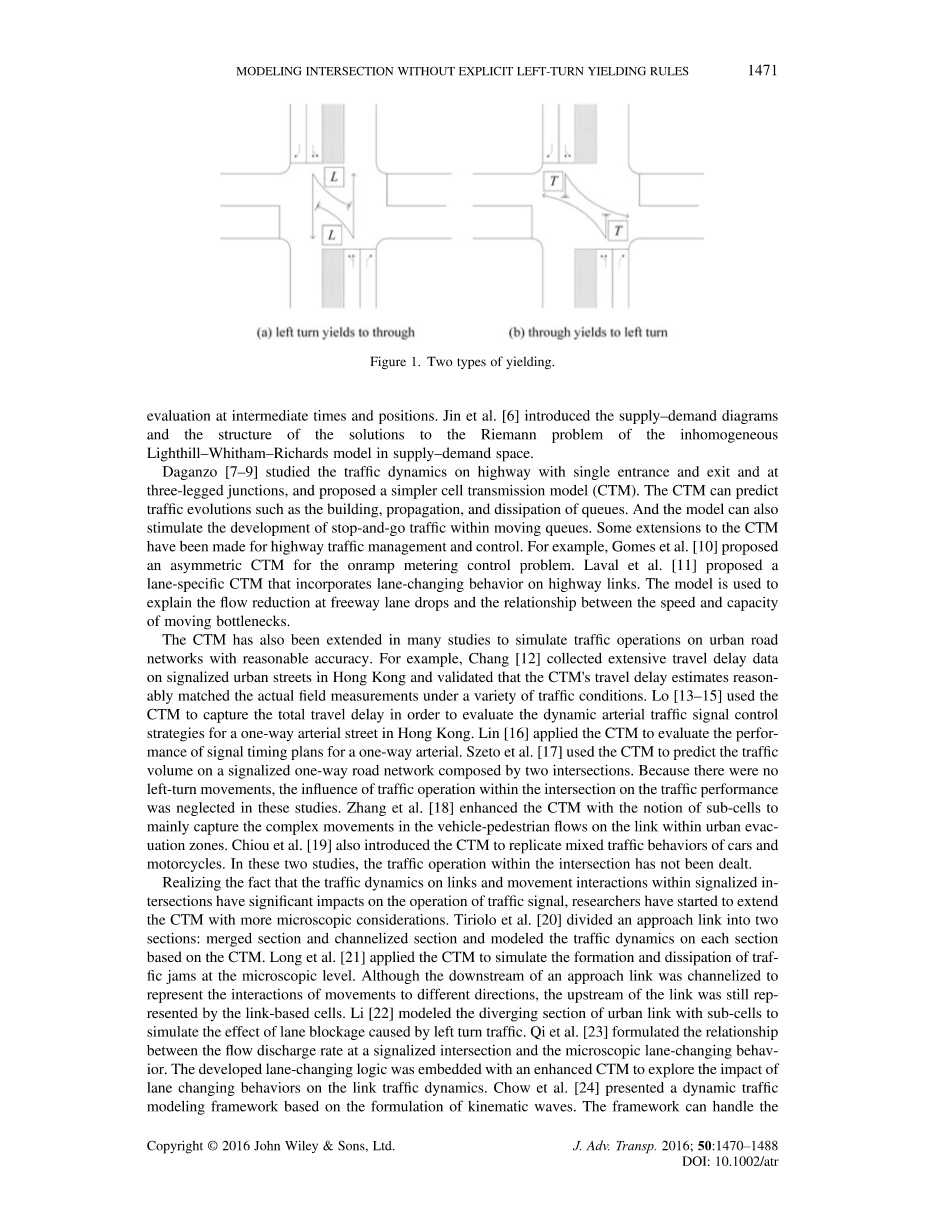
信号交叉口内的交通运行对交叉口的性能有着重要的影响。在两相信号控制的交叉口,左转运动通常需要在允许的相位内向对向直行运动方向让步(见图1a);然而,在某些情况下,在许多发展中国家的城市十字路口,这种明确的允许左转的规则可能不会被一些激进的左转者遵守,在这些地方,激进的左转者会与对向直行车辆竞争,占领冲突点,而不是等待通过十字路口。谁先占领冲突点,谁就会迫使冲突的运动方让步。在左转运动首先占领冲突点的情况下,对向直行车辆需要让步,等待间隙占据冲突点并通过交叉口(见图1b),反之亦然。
这种信号交叉口内的交通运行现象虽然在许多发展中国家广泛存在,但尚未得到充分的研究和建模。在文献综述中,交通流模型一直用于研究和应用于复制高速公路和十字路口的交通运行。例如,Lighthill和Whitham[1]和Richards[2]描述了一维波动理论,该理论可用于高速公路交通流的建模。Newell[3-5]给出了从边界或初始条件出发的累积流的简化形式解而没有中间时间和位置的评估。金等 [6]介绍了供求空间中非齐次光思-惠瑟-理查兹模型黎曼问题的供求图和解的结构。
Daganzo[7-9]研究了高速公路单一出入口和三路交叉口处的交通动态,提出了一种更简单的细胞传输模型(CTM)。CTM可以预测车辆排队的建立、传播和消散的演变过程。该模型还可以促进移动队列中走走停停交通的发展。在高速公路交通管理和控制方面,CTM也做了一些扩展。例如,戈麦斯等人[10]针对匝道控制问题,提出了一种非对称CTM。拉瓦尔等[11]提出了一个特定于车道的CTM,该CTM融合了高速公路路段的变道行为。该模型用于解释高速公路车道减少时的流量减少以及移动瓶颈的速度和容量之间的关系。
在许多研究中,CTM也被扩展到以合理的精度模拟城市道路网络上的交通运行。例如,Chang[12]在香港有信号的城市街道上收集了大量的交通延误数据,并验证了CTM的交通延误估计数与各种交通条件下的实际现场测量值是合理匹配的。Lo[13-15]利用CTM来捕捉总行驶延误,以评估香港单向主干道的动态交通信号控制策略。Lin[16]应用CTM对单向干道的信号配时方案的性能进行了评价。Szeto 等[17]使用CTM来预测由两个交叉口组成的信号单行道网络的交通量。由于交叉口内没有左转运动,因此在这些研究中忽略了交叉口内交通运行对交通性能的影响。Zhang 等人[18]用亚细胞的概念增强了CTM,主要捕捉城市疏散区内的交通-行人流动的复杂运动。邱等[19]还引入了CTM来复制汽车和摩托车的混合交通行为。在这两项研究中,均未涉及交叉口内的交通运行问题。
认识到路段上的交通动态以及信号交叉口内的运动相互作用对交通信号的运行有着重要的影响,研究者们开始从微观的角度对CTM进行扩展。Tiriolo et al[20]将一个入口链路分为两个部分:合并部分和渠化部分,并基于CTM对每个部分的流量动态进行建模。Long等[21]应用CTM在微观层面上模拟了交通堵塞的形成和消散。虽然趋近路段的下游被渠化以表示不同方向运动的相互作用,但路段的上游仍然由基于路段的细胞表示。Li[22]用亚单元模拟了城市道路的分流段,模拟了左转交通造成的车道堵塞效应。Qi等[23]建立了信号交叉口流量与微观换道行为之间的关系。本研究以改良的CTM来探讨变道行为对连结流量动态的影响。Chow等[24]提出了一种基于运动学波公式的动态交通建模框架。框架可以处理交通现象,如车辆排队的集结、消散和城市道路上移动的瓶颈。Flotterod 等[25]对Daganzo的CTM提出了一些实际的扩展,将合并单元和分流单元的数量从2个扩展到2个以上,以模拟四路交叉口的交通动态。罗德等[26]将Flotterod提出的增强型CTM应用于多车道交叉口的信号处理。但在这两项研究中,忽略了交叉口内左转运动与对向直行运动之间的相互作用。Ukkusuri [27]将CTM嵌入到鲁棒系统最优信号控制模型中。CTM被用来估计总行驶时间,总控制延迟和道路网络上的停站数。Su[28]使用CTM模拟了某段干线上信号交叉口的交通运行。这两项研究并没有讨论如何对交叉口内的交通运行进行建模,因此对其性能指标的估计是值得怀疑的。He等[29]采用CTM模拟了由四相信号控制的城市路网信号。在他们的研究中,所有交叉口的左转弯流量都处于保护阶段。
最近的混合建模方法强调了这一点,其中流量在链路层由宏观范式表示,而在节点层由微观范式表示。Burghout[30]构建了一个混合的中观-微观模型,该模型将微观模拟应用于特定的兴趣领域,同时使用中观模型对周围的网络进行更详细的模拟。提出了一个集成框架,满足了模型之间在不同细节层次上保持一致的要求。Flotterod et al。[31]提出了一种将CTM与驾驶员行为微观模型相结合的方法来模拟具有较高计算性能的路网交通。Leclercq[32]还提出了连杆宏观和微观离散耦合的混合模型。定义了简单的接口来转换流量表示时的边界条件。混合模型的需求和供给公式使其与LWR模型完全兼容。这些研究中提出的模型通过链路上交通密度的traf- fic参数或链路上的冲击波、队列形成和消散等交通现象进行了验证,但没有对信号交叉口内的交通运行进行建模。
文献综述表明,上述研究多集中于分流合并模型在交叉口交通运行模拟中的应用,而多集中于进近环节的交通动力学研究。由于CTM及其各种类型的扩展,交叉口内的运营特性及其对交通性能的影响还没有得到充分的解决。如果没有对交叉口内的运行特性进行详细的建模,由于在允许的阶段内左转的动作过于激烈,以及它对交叉口性能的影响,上述交通运行现象很难被准确地捕捉到。为了解决这一问题,本研究提出了一套基于CTM的新公式来捕捉信号交叉口内交通运动的相互作用,并基于所提出的单元表示框架来评估交通性能。
本文的其余部分组织如下。第二节列出了公式中使用的符号。第三节简要介绍了CTM。第四部分提出了改进的CTM模型,对信号交叉口内的交通运行进行建模,并对交通性能进行评价。第5节给出了案例研究结果。结束语载于第6节。
2.符号
为了方便和一致,在本节中列出了本模型中使用的变量。
3.最初的ctm
对于图2(a)所示的基本单元传输,发送流s(t)或接收流r(t)的计算方法为:ijxij,x 1
S (t) = min (Q (t) ?ijxijxtau;,n (t))和R (t) = min(问(t) ?ijxij,x 1ij,x 1tau;,delta;(N (t) ?ij,x 1n (t)))。ij,x 1如果nijx
如图2所示的细胞分化(b),接收流国际扶轮;j′; xthorn;1eth;tTHORN;(j′= ?1, j 1)的计算公式为:
Daganzo建立了交通合并和分流的一般模型,但对信号交叉口内的交通冲突和基于单元表示框架的交通性能评价方法研究不够。我们将在下一节介绍一个增强的CTM,以解决这两个问题。
4增强的ctm
在增强的CTM中,方法链接用基于车道的细胞网格表示,而不是基于路段的细胞序列。每个车道上的队列形成和消散可以用基于车道的单元表示来建模
4.1十字路口表示
假设有两条车道(LT TR) (L、T和R分别表示左、通过和右移动)在东行和西行入口上,三条车道(LT T TR)在一个示例交叉口的北行和南行入口上。示例交集的基于lan的单元表示如图3所示。
在图3中,交集的路径和出口用基于lanbased的单元表示。靠近车道下游的a细胞、a细胞和alocate细胞,离开车道上游的e细胞、e细胞和elocate细胞。i1i2 i3 i1i2 i3 在用虚线矩形标记的交点区域内,本研究定义了两种类型的虚单元。虚拟进场单元A、A和Aare基于动作的单元,分别表示左转、通过和右转的动作;iLiT iR 虚拟出口单元是基于链接的单元,用于处理在交叉出口合并的离开流。i 左转运动细胞传播的过程是:通过运动→E,这是一个→Eī右转运动,是一个→E。iLigrave; iT iRigrave;
在接下来的章节中,我们将开发基于所提出的交叉口表示方案的增强型CTM。
4.2建模方法不同
由于该方法上存在共享车道,因此方法单元中的车辆可能会前进到不同的虚拟方法单元,如图3所示。该方法分流处理从基于lanbased的方法单元到基于move的虚拟方法单元的流传输。根据基于巷道的时间依赖转向比,可以计算出不同出口的车辆,因此,虚拟进近单元的基本参数更新如下公式:
4.3建模退出合并
出口合并处理从移动到出口通道的流传输,如图3所示。在一个交叉口的出口,虚拟出口单元从不同的虚拟入口单元中收集数据流,并将数据流同时发送到不同的出口单元中。i 虚元Eare的参数如式(5)所示:i
通过式(6)和式(7)对虚拟入口单元到虚拟出口单元的融合流进行建模:
虚拟出口元胞向出口元胞分流的流动模型如式所示:
4.4建模活动冲突
当左转向流量在许可相位运行时,左转向流量与对向直行之间存在冲突,交叉口处两个冲突运动建模如图3所示。
由于虚拟单元A和A 是冲突单元,它们不允许同时发送车辆。这意味着 和 满足以下约束:
从约束(9)可以推导出以下情况:
案例1。nAiTeth;tTHORN;frac14;0和奈′Leth;tTHORN;frac14;0,代表没有车辆的情况在任何两个屈服区域t的一步。因此,约束(9)自然拥有;
例2。nAiTeth;tTHORN;gt; 0和奈′Leth;tTHORN;frac14;0,代表的情况,只有通过运动车辆在屈服区t的一步。因为约束(9)自然保持,在穿越运动中允许车辆在步骤t中占据冲突点;
例3。nAiTeth;tTHORN;frac14;0和奈′Leth;tTHORN;gt; 0,代表的情况只有车辆左转运动我′L在屈服区t的一步。同样,因为约束(9)自然保持,允许左转运动i L上的车辆在步骤t中占据冲突点;和
例4。nAiTeth;tTHORN;gt; 0和奈L′eth;tTHORN;gt; 0,代表的情况,车辆在通过运动和反对左回转运动我′L收益率在自己的领域开始的时候一步t。在这种情况下,我们eth;tTHORN;gt; 0和SAi L′eth;tTHORN;gt; 0。为了保持约束(9),只允许两个运动中的一个运动上的车辆取冲突点。步骤t结束时,最终采取冲突点方向的车辆取决于以下情景:
1.IfsAiTeth;t吗?1THORN;gt; 0和sAi′eth;t ?1THORN;frac14;0,代表通过运动情况的车辆的冲突已经采取了它在一步t点?在步骤t中,允许其上的车辆继续占据冲突点。即seth;tTHORN;gt; 0和seth;tTHORN;frac14;0,满足约束(9);AiT Ai′L
2.IfsAiTeth;t吗?1THORN;frac14;0和sAi′eth;t ?1THORN;gt; 0,代表情况的车辆左转运动我′t冲突已经在一步? 1,然后左转的车辆运动我′L可以继续占领的冲突时刻t。也就是我们eth;tTHORN;frac14;0和sAi′Leth;tTHORN;gt; 0,满足约束(9);和
3.如果我们eth;t吗?1THORN;frac14;0和sAi′eth;t ?1THORN;frac14;0,这表明绿色的开始阶段或车辆的情况在两个运动到达一步t矛盾点。在这种情况下,冲突点将首先被来自两个方向之一的更具侵略性的头车占据。引入统计概率变量来确定哪一个虚拟进近单元先放车。设p(t)为随机变量,p为虚拟小区中车辆先走的统计概率变量。iTiT iT 当p(t)le;p时,表示它所处的穿越运动的车辆将占据第t步的冲突点,相反的左转运动irsquo;l的车辆将不得不在它的让行区等待通行权。iTiT也就是我们eth;tTHORN;gt; 0和赛′Leth;tTHORN;frac14;0。否则,表示左转运动i L上的车辆将占据第t步的冲突点,而穿通运动i L上的车辆将不得不在让路区等待通行权。也就是说,我们eth;tTHORN;frac14;0和sAi L′eth;tTHORN;gt; 0。因此,约束(9)在两个子案例中总是成立的。
4.5交通信号操作建模
交通信号的影响可以用下式来考虑:
由式(10)可知,有效绿灯期i路段j车道的最大交通流流量为饱和流量,有效红灯期为零
4.6交通建模性能
使用基于通道的单元表示,可以分别捕获不同通道中的队列,并根据单元状态进行估计。在本研究中,如果单元格不是空的,且没有车辆驶出,则将链路i上j巷的单元格x的状态定义为“被阻塞”;否则,将单元格的状态设为“open”,由:
根据每个时间步长的车道单元状态序列,可以动态计算队列中车辆的数量。对于链路i上j巷的队列,则有:
一旦确定了单元的状态,就可以相应地导出流量性能指数。最大队列长度在车道j联系我直到时间T, l, l,可以用下面的方程估计:
第i链路j车道所有排队车辆到第T时刻的总停车延误d(T)可由下式估计
在式(14)中,我们假设在每个时间步,车辆在链路i上的j车道均匀加入队列并离
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238512],资料为PDF文档或Word文档,PDF文档可免费转换为Word

