
英语原文共 10 页
基于虚拟仪器技术的离心泵压力脉动和水动噪声测试系统
摘要
我们建立了一个基于虚拟仪器的系统,对离心泵的压力脉动和水动力噪声进行了测试和分析。 它具有可调节的采样时间长度和频率,可以避免由于固定采样参数引起的数据丢失和冗余的缺点。 通过建立LabVIEW编译的信号预处理工具包,利用低通滤波器防止信号混叠,通过小波去噪降低相关频率的噪声,有效降低测试系统引起的误差。同时,该系统中的数据分析工具包不仅包括用于获得频率特性的信号功率谱和倍频,还包括测量波形之间的相关性分析和用于检测信号特征的小波分析。 所有工具包都可以用作自动实时系统。 该系统的可行性已经在离心泵系统中进行了评估,证明该系统能够自动实现和分析压力脉动和内部水动力噪声。
关键词:虚拟仪器,压力脉动,水动力噪音,小波去噪,小波分析
导论
在许多应用中,泵的制造和测试都符合标准和规范,其中定义了最大允许振动幅度和噪声幅度。 所有这些作用的重要性随着叶轮的圆周速度而增加,尤其是在高压泵应用中都会遇到振动和噪声问题。通过流体机械的流动使这些机构显示出产生不稳定性,并且不仅引起了机器上的动态负载而且产生噪声。 众所周知,叶轮出口处的流动是不均匀的。 因此,扩散器叶片或蜗壳切割的水接近于紊流。 定子叶片处的流动作用于叶轮中的速度场, 这一相关现象称为“转子/定子相互作用”(RSI)。 RSI的结果,产生液压激励力。这会在各种泵组件中产生压力脉动,机械振动和交变应力。 传递到地基的振动作为固体噪声传播贯穿整个结构。 压力脉动激励泵壳振动, 它们作为流体传播噪声流经管道系统,产生管壁的振动。 振动的墙壁和结构辐射出经由空气传播的噪音。
因此,对离心泵中的不稳定流动,压力波动和噪声的研究已经进行了很长时间。自1995年以来,Chu和Dong首先处理了非稳定流动结构,压力波动[2,3]与离心泵内噪声产生之间的关系。越来越多的人通过数值计算对离心泵的非定常流量,压力波动和噪声进行了研究。此类方式也是不同类型泵和不同方法的几项研究的主题,从无粘模型到大涡模拟(LES)流动模拟,包括2D和3D模型来研究流体动力脉动。但是实验方法仍然是研究该主题的主要方式[4,5,6],而如今,由B&K .inc或HEAD.inc提出的特殊测试和分析系统主要用于测试和分析离心泵的水动噪声和压力波动。该系统具有高精确,高可靠性和易于使用,但它不适合研究离心泵中的压力波动和噪音。 对于特殊测试系统中使用的固定采样参数,可能导致数据丢失或冗余; 而且诸如FFT之类的简单数据处理无法提取信号的特征。 正是由于这些原因,关于噪声,压力脉动和离心泵振动的这一课题的成就主要是关于叶片通过频率[7]。
对于分析方法,测试方法和数据处理,仍有一些工作需要参考。 鉴于此,本文采用虚拟仪器技术,采用“软件代替硬件”的思想,开发了基于LabVIEW的离心泵压力脉动和流量噪声测试分析系统,来提供了更合适的测试方法, 用于研究离心泵压力脉动,噪声和振动的分析系统。
测试系统组件
水动力噪声和压力脉冲测试系统由三部分组成:泵 - 水系统,信号分析与处理数据采集系统以及水循环自动化操作系统。 各部分的功能和连接如图1所示。泵 - 管道系统是测试系统的基础,提供各种操作环境来测试水的信号采集和控制; 利用信号分析与处理数据采集系统研究研究对象的特征; 水循环自动化操作系统可以改变泵的运行状态,研究在运行条件改变时研究对象的特性变化。 所有这三个部分共同构成了这个自动化测试系统。
图1.测试系统的组成
1.泵管道系统
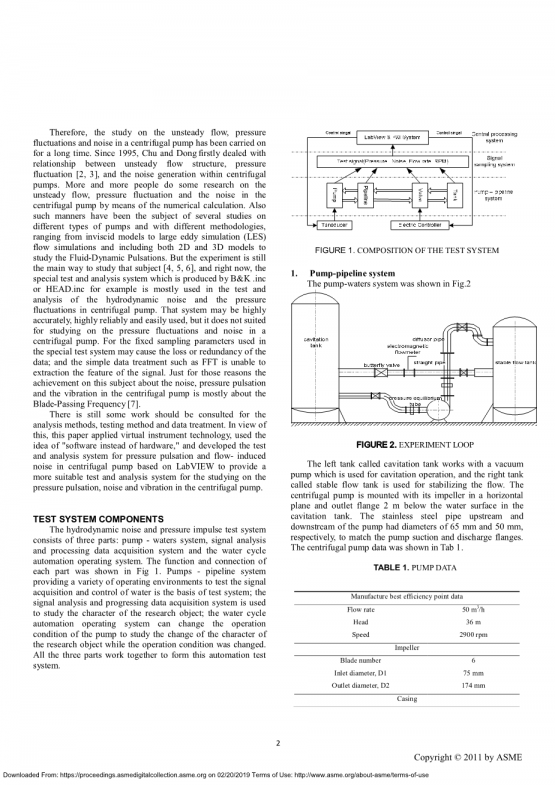
泵水系统如图2所示
图2.实验环节
称为空化罐的左罐与用于空化操作的真空泵一起工作,称为稳定流罐的右罐用于稳定流动。 离心泵的叶轮安装在水平面上,出口法兰位于空化罐内水面下方2米处。 泵上游和下游的不锈钢管的直径分别为65 mm和50 mm,以匹配泵的吸入和排出法兰。 离心泵数据显示在表1中。
表1.泵数据
2.信号采样系统
使用位于泵上游的热电偶测量回路中的水温,测量在13-16℃的范围内。 使用两个压电式压力传感器测量泵头,其中测量值针对泵上的高度和速度差进行校正。 使用泵上游的磁感应流量计测量流量。
使用压电压力传感器测量压力波动幅度,并且通过使用尽可能靠近管壁的螺栓将压电传感器安装在管壁上。这种安装方法可以减少换能器和测量点之间的空气冲击,这种空气冲击可能导致在滤除高频波动时产生偏差。通过ST70模式的水听器测量流体动力学噪声;细节如表2所示。水听器的表面靠近管壁;这种安装方法可以可靠地测量声场中的水脉冲,从而使管的流场具有最小的冲击。然而,这种方法使得在水听器测量中产生壁边界层噪声,但是现有研究表明,当管道中的水流速度较低时,边界层噪声与声音脉冲相比非常小。压电式压力传感器和水听器安装如图3所示。
图3.压电压力传感器和液压器的安装
表2 ST70
3.控制系统
可以根据使用水控制系统的设置来改变操作条件及其变化参数,例如电动机速度和泵流速。 在系统运行中,参数状态将通过各种流体动力传感器收集到计算机,计算机自动采集数据并比较设定参数,然后通过PID控制反馈给变频器或电控,完成泵速和 阀门控制,所以参数调整过程是自动完成。
4.中央处理系统
在中央处理系统中,DAQ(数据采集)系统可以根据样本参数从采样器获取电信号数据,例如采样时间,采样数和超时,可以根据需要进行配置,例如 ,如果频率范围很宽的信号需要研究整个频率响应范围,那么采样时间可以设置得很快,但采样数不需要那么大,那么样本参数可以设置为与固定采样参数相比没有限制必要。
当信号被采集到系统中时,电气自动收缩到工程单位; 同时,家权滤波器和小波降噪包可以降低信号中的噪声。 在分析包中,频率特性可以通过频率和倍频分析获得,可以分析测量之间的相关性,也可以通过小波分析检测信号的特征量提取。 最后,通过使用可视化数据包,可以有效地显示整个信号和分析结果。 该过程如图4所示,细节将在下一章中显示。
图4.中央进步系统的工作流程
系统的硬件设计
1.虚拟仪器配置文件
虚拟仪器是在通用计算机平台上,用户根据需要定义和设计设备的测试功能,使用户操作机器就像操作自己设计的相同设备。 随着虚拟仪器概念的出现,突破了传统设备制造商对于用户无法改变工作模式的定义,用户可以根据自己的需求进行设置,并可以设计自己的仪器系统。 在测试系统和设备设计人员可以充分利用软件而非硬件,可以充分利用计算机技术和扩展传统的测试系统,“软件是设备”是最简单的虚拟仪器概念,也是最重要的 表达。 没有计算机控制,虚拟机无法工作; 虚拟仪器设计软件是最重要,最复杂的部分。
2.测试系统的硬件组件
鉴于流动噪声的特性,在水动力噪声测试系统中应具有高精度声音频率,及时采样,大动态范围,低噪声和低失真,同时水听器必须与电子压电(IEPE)信号调理集成一起工作。所以采用PXI-4472动态信号采集板用于测量噪声和压力脉冲。其参数如表3所示。
由于这些传感器中的大量测量参数和各种输出,多功能数据采集板都曾经使用。 同时该板还用于输出控制信号以控制换能器。
表3.数据采集板参数
系统的软件设计
LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一个图形化编程开发环境,具有传统的编程语言的开发和调试工具。其最大的特点是图形化编程语言易于掌握,开发友好,逼真的用户界面和强大的信号处理。 LabVIEW集成了几乎所有硬件通信功能,如数据采集板。 LabVIEW包含在前面板和流程图中(框图)。前面板包括控件和显示对象(指示器),是LabVIEW图形用户界面,集成了输入和输出的用户界面。后面板包括VI(功能)和结构的内置功能以及连接端子对应于前面板控制对象和指示器。在后面板中,程序员可以控制和操作前面板上显示的输入和输出功能。主VI将分为几个基本功能的子VI。每个子VI都可以封装,只显示输入和输出接口。从而节省编程时间,程序员可以轻松完成虚拟仪器的软件功能。
1.信号采集与控制的实现
完整DAQ系统的最后一个组件是软件。 计算机通过DAQ设备接收原始数据,并且程序读取并分析数据。 在信号采集中,时间连续性和混叠是我们在测量分析中应该考虑的常见问题,为了解决连续采集的问题,应该采用图5所示的过程,即将这些操作作为配置,启动和清除 在循环外,只执行一次,而只有AI Read和必要的数据处理将在循环[9]中完成。
图5.采集流程的模式
当动态信号被离散地采样时,其中频率分量大于奈奎斯特频率—也就是采样率的一半,这就是混叠现象,采样太慢导致混叠,使得模拟信号歪曲。 为避免混叠,采样速度比信号频率快几倍。 但是,如果采样时间在很长一段时间内如此之快,则可能没有足够的内存或硬盘空间来保存数据。 因此,特殊的测试系统中使用的固定采样参数可能会导致数据丢失和冗余的缺点。 基于此,应根据用户的需要调整样本参数。 采集程序如图6所示,该程序充分发挥样本参数可以调整的DAQ系统,所有信号都自动划分为工程单位,数据保存为全局共享变量,可用于其他 Vi显示和分析。
图6.信号采集的后面板
通过使用逆变和电动控制阀可以改变运行条件及其变化参数,例如电动机速度,泵流量,逆变由0-5V电压信号控制,对应于最小频率输出(0Hz)和最大频率输出(60Hz)(根据中国交流频率),电控阀由4-20 mA电流信号控制。 两个控制信号都与PXI-6251连接,输出控制信号由VI中配置的PID控制根据采集数据和设定参数之间的差值计算得出。 对照Vi的后面板如图7所示。
图7.系统控制的后面板
图8是监视和控制的前面板,通过这个交互式界面很容易操作系统。
图8.监测和控制的前面板
2.实现信号预处理
作为分析设备的仪器响应所有获得的信号都受到噪声和混叠的影响。出于实际目的,通常多次进行采样,最高频率为5到10倍在工业中是较典型的。 但即使被测信号具有较高频率或频率,从杂散信号(例如电力线频率或来自本地无线电台)的拾取可能包含高于奈奎斯特的频率。 然后,这些频率可以混叠到期望的频率范围内,从而给出错误的结果。 为了完全确定输入信号的频率成分是有限的,在分析之前添加低通滤波器以防止发生通过衰减较高频率(大于奈奎斯特)来对混叠分量进行采样。 并且在实际中,截止频率应设置为采样频率的一半。
图9.抗混叠滤波器的子VI
测量噪声降低了分析的准确度和精度,并且还降低了仪器技术的检测限。 因此,在分析响应优化中非常需要信号去噪。 信号去噪有不同的可能方法,数字滤波器仍然是最广泛使用的,但它虽然很容易在计算机中实现,但却无法降低通带中的噪声。 并且在压力脉冲和噪声的信号中,在叶片通过频率以下的某个频率域上存在连续的频谱,这可能是由分离的流动和湍流中的主要随机涡旋引起的。 并且这部分的研究可能受到噪声测量的影响,而在该频域上不太可能降低噪声测量。
最近的一种方法是基于小波变换。 小波是一个新的基本功能系列,在时域和频域w1x都很好地定位。 由于它们的局部特性,小波域中信号的表示是稀疏的并且允许信号压缩和去噪。
小波去噪是一种降噪方法,通过在小波域中应用阈值并对去噪小波系数进行逆变换,将损坏的信号转换为小波域。 基于小波变换的方法可以产生比传统方法高得多的去噪质量。 此外,基于小波变换的方法在去噪后保留信号的细节。 这个过程可以在LabVIEW中实时实现。 在该测试中,将测量噪声视为白噪声,根据高频中测量噪声的阀门设置阈值,该高频率远高于叶片通过频率。 然后,测量噪声在由层流和紊流中的涡流引起的部分的研究上没有区别。
图10.小波去除的子VI
图11.信号预处理的后面板
图12.A. 原始信号
图12.B. 过程信号
图12.C. 原始信号和过程信号的光谱
图11显示了预处理的效果,正如图12.a和图12.b所示,原始信号中的毛刺在预处理中减小。 如图12c所示,通带中的噪声降低,并保留了信号的特征,如刀片通过频率。
3.信号分析的实现
程序的数据分析部分在图13中表示。有一个用于信号分析的主面板(图14)。 在分析14中,用户选择要读入的信号的某一部分。对可以在任何时间引入的数据量进行限制(这对于避免在实时过程使大数据文件的系统RAM过载是必要的)。 通过图15中所示的状态机制结构选择信号。
然后,当用户选择分析时,将所选信号发送到分析子vi中。 用户可以选择同时查看任何或所有分析面板。

