三维非对称边坡稳定性分析Bishop、Janbu和 Morgenstern–Price技术的扩展
摘要:大多数现有的三维边坡稳定分析方法都是基于相应的二维分析方法和对称的或滑动方向被假定的平面分析方法。本文根据Bishop简化、Janbu简化和morgenstern-Price方法,建立了三维非对称的边坡稳定性分析模型。在这些新的公式中,滑动的方向是唯一的,是由三维力/力矩平衡决定的。新方程的结果与一般情况下的经典方法相似,但在横向荷载作用下,数值更稳定。此外,作者们证明,目前的公式实际上等效于Jiang和Yamagami的轴旋转公式,但更方便地用于一般问题。作者还发现了在3D极限平衡分析中固有的局限性,这在相应的2D分析中是不存在的。
介绍
所有的边坡破坏本质上都是三维的, 但通常采用二维建模, 因为这能大大简化分析。目前, 现有的3D边坡稳定分析方法存在诸多弊端, 其中包括:
- 在大多数现有的边坡稳定公式中并不考虑边坡滑动方向, 因此所考虑的问题必须在几何结构上和荷载上是对称的。
- 在一般情况下, 临界球形3D破坏面的定位是一个难以有效解决的全局优化问题;
- 现有的分析方法在横向水平力下的数值是不稳定的。
由于上述局限性, 在实际应用中, 基于极限平衡的3D分析方法还很少采用。Cavounidis(1987)证明过,三维分析下正常边坡的安全系数大于二维分析。Cheng等(2005),提出了利用NURBS曲面对任意球形破坏曲面进行建模, 并利用模拟退火法对临界3D破坏面进行定位, 这适用于任意3D稳定研究方法。将NURBS 曲面与合适的3D稳定性分析方法结合使用, 使得在程序工程设计中使用3D边坡稳定性分析成为可能。
Baligh和Azzouz(1975),Hovland(1977), Chen和Chameau(1982),Ugai(1988),Leshchinsky等人(1985), Leshchinsky和Baker(1986),Leshchinsky和Huang(1992), Hungr等人(1989),Hungr(1987, 1994, 1997),还有Lam和Fredlund(1993, 1994)提出了各种3D边坡分析方法。所有这些方法都是基于常规2D方法的简单扩展。Baker和Garber(1978)、Baker和Leshchinsky(1987)考虑了变分原理在2D和3D稳定性分析中的应用,但这一构想在实际问题上非常复杂,在实践中很少采用。所有以上的3D方法都依赖于在分析中假设的对称平面。对于复杂的地面条件,这种假设不再有效。破坏体将会沿着阻力最小的方向滑动,因此滑动方向也会控制边坡的安全系数。Strak和Eid(1998)还表明,3D 边坡的安全系数受滑动方向的控制,对称破坏可能不适用于一般边坡。Yamagami和Jiang(1996,1997)还有Jiang和Yamagami(1999)提出了第一种解决不对称问题的方法,在这种方法中当滑动方向被考虑为具有遵守绕轴线旋转的最小安全系数时,所使用的方程为传统的稳定性方程。Yamagami 和jiang(1996,1997)的公式可能是非常耗时的,即使对于单一的破坏表面也是如此,因为在稳定性分析中,单元的构造和绕轴旋转的几何信息的确定的计算是最费时的。Huang和Tsai(2000)提出了一个3D不对称的Bishop方法,此方法中滑动方向直接融入到安全系数的确定中。Huang等人(2002)的广义3D边坡稳定性方法,实际等效于对横向剪切力进行了一些简化的Janbu严格方法。由于Janbu严格方法中很难完全满足推力约束条件,所以一般由Huang等人(2002)提出的3D 方法将难以收敛, 因此该方法在实际问题中的应用有限。
在破坏面的边缘,岩土体可以被考虑为不会形变的块体。边坡的滑动方向有三种发展趋势:
- 岩土体在以唯一的滑动方式同一个方向滑动;
- 岩土体正向彼此移动;
- 岩土体相互移开。
第一种情况被作者和许多其他研究员在当前公式中采纳。第二种情况违反了刚性失效块体的假设,不考虑。第三种情况已被Huang和Tsai(2000)、Huang等人(2002)采纳。当岩土体在第三种情况下移动时, 确定安全系数的求和过程可能不适用。作者将在后面的部分演示,在横向荷载作用下,不同岩土体的不同滑动方向的要求可能导致不收敛。在这种限制性的观点中, 唯一滑动方向的假设可能是一个可以接受的用于分析极限状态构想, 而且目前的公式是基于这个假设的。当破坏开始, 岩土体可以相互分离, 滑动方向在不同的块体之间可以不同, 但这对计算安全系数的影响不大。
3D Morgenstern–Price 法: 力与力矩平衡
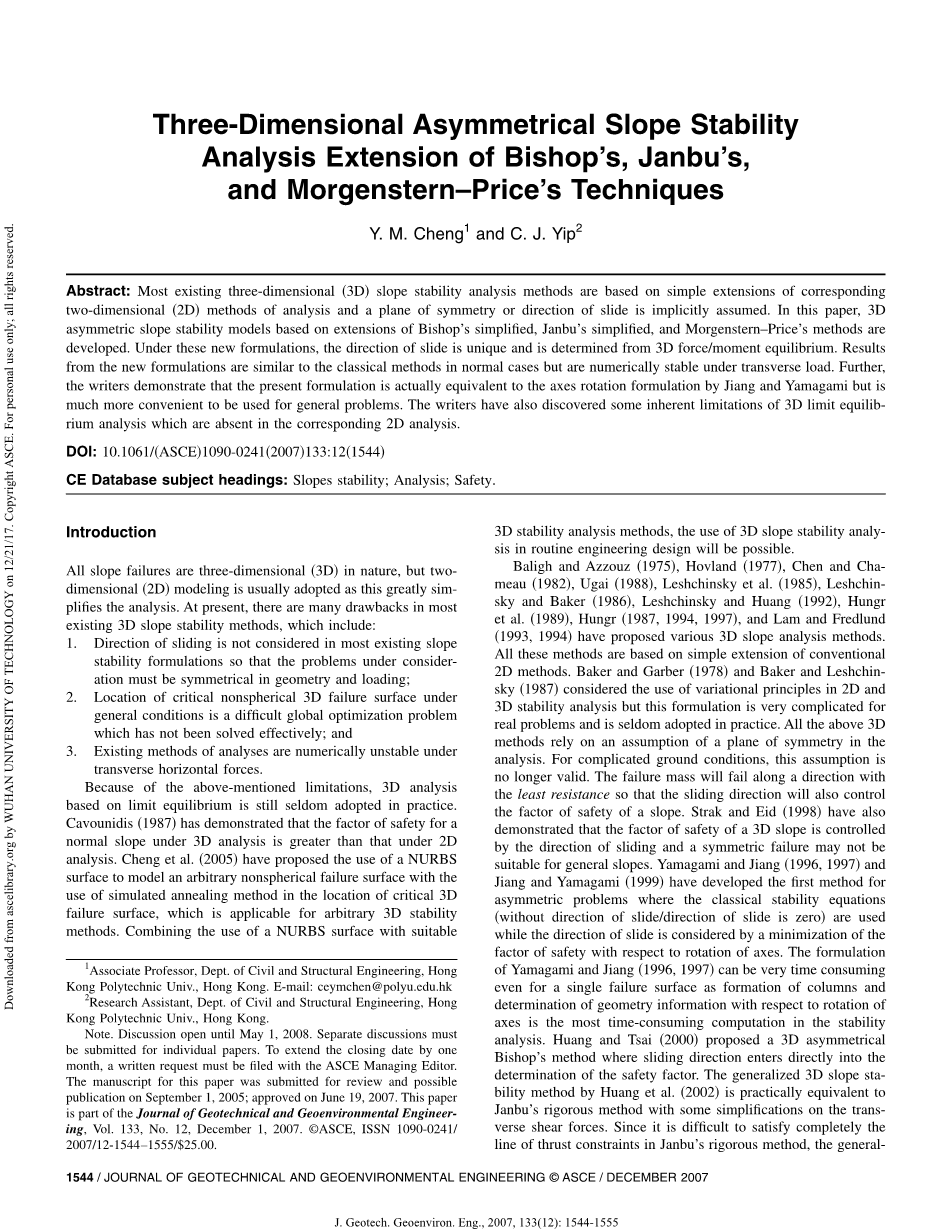
对于三维分析,潜在的边坡破坏体被分成若干单元。在极限平衡条件下,在每个岩土单元上作用的内力和外力在图(1)中显示。土体的重量和竖向荷载被简化假定为作用在每一单元的中心。这种假设不是完全正确的,但如果每个单元的宽度足够小,就可以使结果方程得到高度简化,并且应该足够用于实际应用。目前3D方程所需的假设是:
- Mohr–Coulomb破坏准则有效;
- 对于Morgenstern—Price方法,安全系数是由滑动方向(对于力和力矩的安全因素是相等的)确定的;
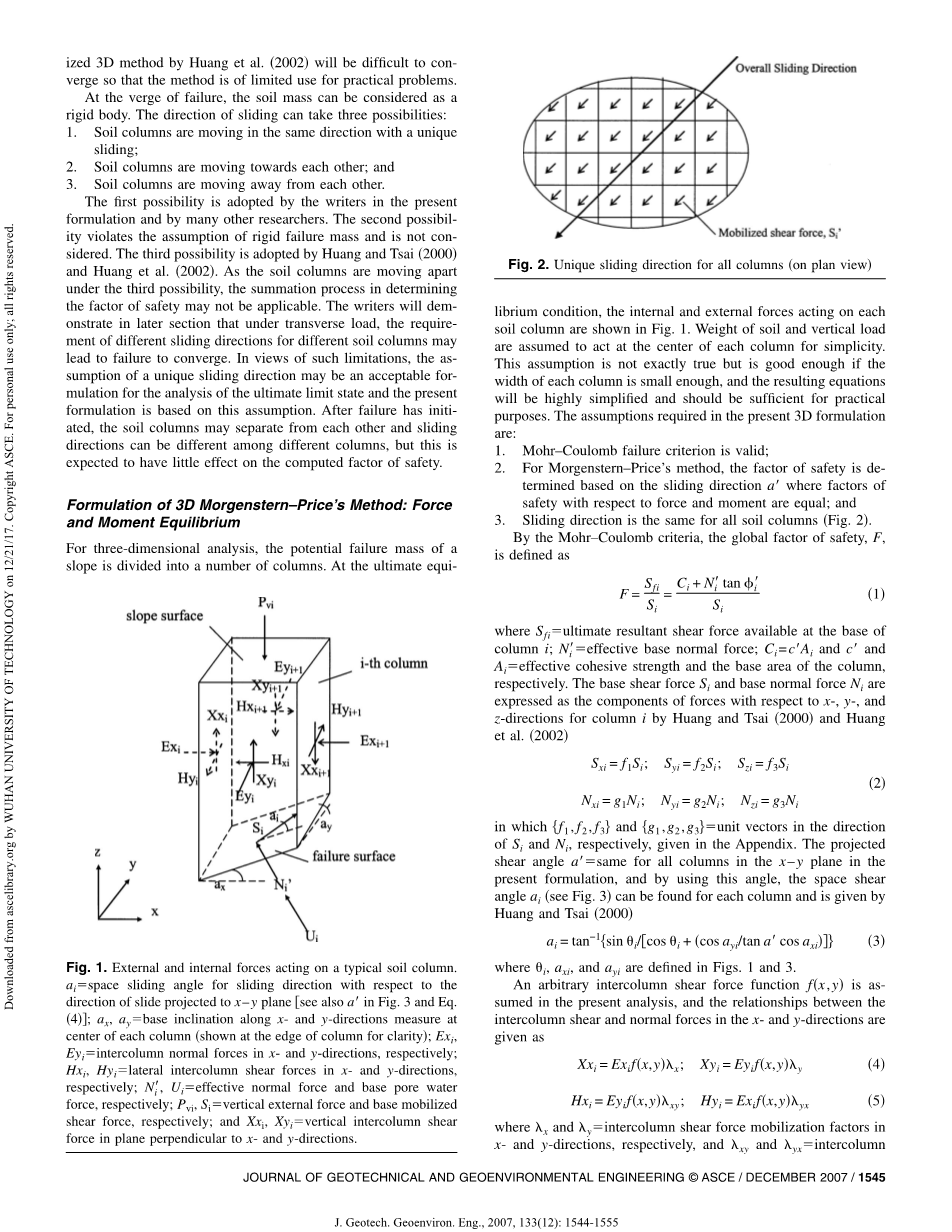
- 所有岩土单元的滑动方向是相等的,如图2
根据Mohr-Coulomb准则,总体安全因素F被定义为:
(1)
其中, =在单元i底部上可获得的最终剪切力;=有效的底部正力;=, 、=分别为有效的凝结强度和岩土单元底部面积;岩土单元i底部的剪力 和底部正力 被Huang和Tsai(2000)、Huang等人(2002)表示为在X、Y、Z方向上的分力
; ;
(2)
; ;
其中,和 =分别表示在和方向上的分力,在附录中会给出。投影剪切角=由Huang和Tsai(2000)所给出,对于在本公式中的所有x–y 平面中的岩土单元,使用这个角度,可以为每一个岩土单元找出所对应的空间剪切角 (见图3)
(3)
其中,和如图1和图3中所示。
在本分析中假定了任意intercolumn剪切力函数,并给出了intercolumn 剪切与 x 和 y 方向上的正力之间的关系, 如下:
; (4)
; (5)
其中,和=分别表示intercolumn剪切力在x方向和y方向的可变系数;和 =分别表示intercolumn剪切力在xz平面和yz平面的可变因子。
截取第i个岩土单元中心的z轴,两个侧向intercolumn剪切力的关系可以被表示为:
(6)
其中,和=在图4中所给出的岩土单元的宽度。来自公式(6)
(7)
(8)
和对于外部的岩土单元应该为零,或者等于被定义了的所施加的水平力。利用剪切力互补原理(或者在xy平面中的力矩平衡), 或 可以根据公式(5)、(7)、(8)按顺序从外部岩土单元确定。因此只有 或 需要确定并不需要两个都确定。在以往的三维边坡稳定性分析方法中,重要的剪切力互补概念即弹性剪切力=未被使用,但在现在的公式中极为重要。值得注意的是Huang等人(2002)为了使对称问题能够得到有效的解决,于是把非对称问题中的假定为零。虽然剪切力互补的概念只适用于岩土单元无穷小的情况,但是,如果岩土单元的尺寸不是大,假设剪切力互补将会使方程得到极大的简化。更重要的是作者在之后会有一小部分的章节证明剪切力的影响会很小,这样假设所产生的误差并不会对结果造成影响。
图1.外力和内力作用在典型的岩土单元上
=滑动方向的空间滑动角与投影到x–y平面上的滑动方向有关[参见图3和方程(4)中的];,=每单元体中心沿x和y方向测量的基倾斜角[为了清楚而展示在每个单元的边缘];,=分别为intercolumn在x和y方向上的正常作用力;,=分别为在x和y方向上的侧向intercolumn剪切力;,=分别为有效的正力和基本孔隙水力;,=分别垂直外力和基部移动剪切力;,=垂直于x和y方向的平面纵向intercolumn剪切力。
移动剪切力,
图2.在计划中所有单元体的滑动方向都是唯一的
(的投影)
位于单元体基部
其中:
和需要被定义在每个单元体的中心,但是为了清楚,展示在每个单元体的边缘
图3.在单元体i上,空间剪切角与其投影的关系
图5.一个典型单元体上的水平力平衡
(=净侧向intercolumn剪力)
X、Y、Z方向上的力平衡
分析第i个岩土单元在X、Y、Z方向上的垂直力和水平力的受力平衡(图5、6)如下:
=( (9)
(10)
(11)
解出方程(1)、(4)、(9),基础常力和剪切力可被表示为:
; (12a)
其中,
; (12b)
=(=第i个岩土单元的平均孔隙压力), =,
=
图6.一个典型单元体上的水平力平衡
(=净侧向intercolumn剪力)
图7.x、y方向上的力矩平衡
X 和 Y 方向上的所有力和力矩的平衡
分析所有力在x方向上的平衡(内力E已抵消)
(13)
带入方程(1)和(12)中的,重新整理方程(13),方向安全系数可以被定义为
, (14)
来自x方向上所有力矩的平衡(图7)
(15)
其中,和 =力臂。同样地,分析所有力在y方向上的平衡
(16)
带入方程(1)和(12)中的Fy,重新整理方程(16),方向安全因子可以被定义为
, (17)
所有y方向上的力矩平衡(图7)
(18)
基于实验所得的滑动角,在方程(14)所给的指定区间内变化,直到计算所得的满足x方向的力矩平衡方程(15)。也是同样变化,直到足y方向的力矩平衡方程(18)。如果ne;,滑动角将发生变化,直到=,同时使力和力矩达到平衡条件。由于所有的平衡方程都已在公式中使用,所以没有任何等式来确定 ,除非有其他的假设来说明。在目前的方程中,作者建议可以由用户指定,或者可以从最小化安全系数的角度来确定。与相关的问题以及这个参数的重要性将在题为“关于 的 Morgenstern–Price 分析的讨论”一节中进一步讨论。
归纳3D Bishop和 Janbu 的简化方法
所提到的Morgenstern–Price分析方法可以通过单独考虑力或力矩平衡方程还有忽略所有的intercolumn垂直方向和水平方向的剪切力,从而归纳到Bishop和 Janbu 的简化方法中。考虑到x方向上的力矩平衡和一条轴线穿过(x0,y0,z0)(球形破坏面的中心)并且平行于y轴。带入方程(1)中的,重新整理方程(15)得:
(19)
相应的由方程(18)求得,如下:
(20)
其中,
;
考虑到力矩平衡和一条轴线穿过(x0,y0,z0)(球形破坏面的中心)并且平行于z轴,得出:
(21)
带入方程(1)中的,重新整理方程(21),得:
(22)
对于3D非对称Bishop分析法,在力矩平衡点,方向安全系数,,,彼此相等。在这种情况下基于力矩的总体安全系数
全文共25232字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9877],资料为PDF文档或Word文档,PDF文档可免费转换为Word

