
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
外文翻译
SCAAT: 不完全信息的增量跟踪
Greg Welch 和 Gary Bishop
北卡罗来纳大学教堂山分校
理论
我们提出了一种新的关于交互式计算机跟踪用户状态(位置和方向)的数学方法。该方法广泛适用于商业和实验系统。 通过适当连续观察研究的现象、滤波传感器测量以及同时对源和传感器设备进行自动校准来提高精度。它利于用户运动预测、多传感器数据融合和更高的报告速度,并且比以往的方法具有更低的延迟。
跟踪系统通过接收来自后台硬件传感器的信号来确定用户的状态,由于物理学和经济的原因,大多数系统按顺序进行多个测量,然后将其组合起来生成一个跟踪器报告。例如,使用SPASYN(SpaceSynchro)系统的商用磁跟踪器依次测量三个磁矢量,然后以数学方法将他们组合起来,生成传感器状态的报告。
我们的新测量产品以新的低水平传感器测量方法产生报告而不是等待收集完测量结果。因为单次观测受数学的约束,我们将我们的方法称为单约束实时跟踪或SCAAT跟踪。关键是单次观测提供了一些关于用户状态的信息,因此可以用于逐渐地改进先前的估计。我们逐渐接受这个现象,尽量慎重的处理新的传感器数据。通过这种方法,我们能够更易于得出估值,延迟更小,准确性更高。我们得出的结果既有真实性又有大量的模拟做基础。
CR 关于类别和主题的描述: 1.3.7[计算机图形学]三维图形和真实感-虚拟现实;I.4.4[图像处理]复原-卡尔曼滤波;I.4.8[图像处理]场景分析-传感器融合;G.0[计算数学]一般-数值分析,概率与统计,数学软件。
其他关键词和短语:虚拟环境跟踪,特征跟踪,校准,自动校准,延迟,传感器融合,卡尔曼滤波。
1.简介
我们认为,我们提出的方案需要从根本上改变人们对一组未知信息的估计方式,特别是对虚拟环境的跟踪。我们大多数人有一种先入为主的观念,即要估计一组未知数时,我们需要尽可能多的约束,就像在任何特定时刻都有自由度一样。相反, 随着时间的推移,我们提出了一种约束未知数的方法,一次一个约束,继续改进解决方案。
对于那些通过物理设备的实时观测(例如通过传感器的测量或对地标的视觉观察)来提供约束的应用,SCAAT方法排除了误差在个别测量中的影响。这种方法具有在跟踪的时候提供改进的卡尔曼滤波以及单独校准各自的设备或标志的能力。该方法便于用户运动预测、多传感器或多模态数据融合,并且在约束只能按顺序确定的系统中,它有比多约束(批处理)方法更高的速率和更低的延迟。
关于虚拟环境的跟踪,我们目前正在使用SCAAT方法和新版本的UNC广域光电跟踪系统(第4部分)。商业跟踪系统的开发者也可以使用这种方法来改进他们现有的系统,或者终端用户可以使用它来改进定制的多模态混合系统。关于估计一组未知数的更普遍的问题,是由一组数学约束联系在一起的。可以用该方法来衡量预测时间的准确程度。例如,当解决方案中的不确定性达到可接受的水平时,我们可以停止加入个别的限制因素。
-
- 部分资料
我们可以建立一个跟踪系统,利用每一个传感器的测量或观察数据来产生一个新的估值。这是一个非常有趣的想法。毕竟,个人观察通常只提供关于用户全部状态的部分信息(状态),即它们是“不完全”的观察。例如,对于在场景中观察地标的摄像机而言,从任何一个地标的观察中只能获得有限的信息。在控制理论方面,设计为只使用这种不完全测量的系统是不可行的,因为不能从测量中观察(确定)用户状态。
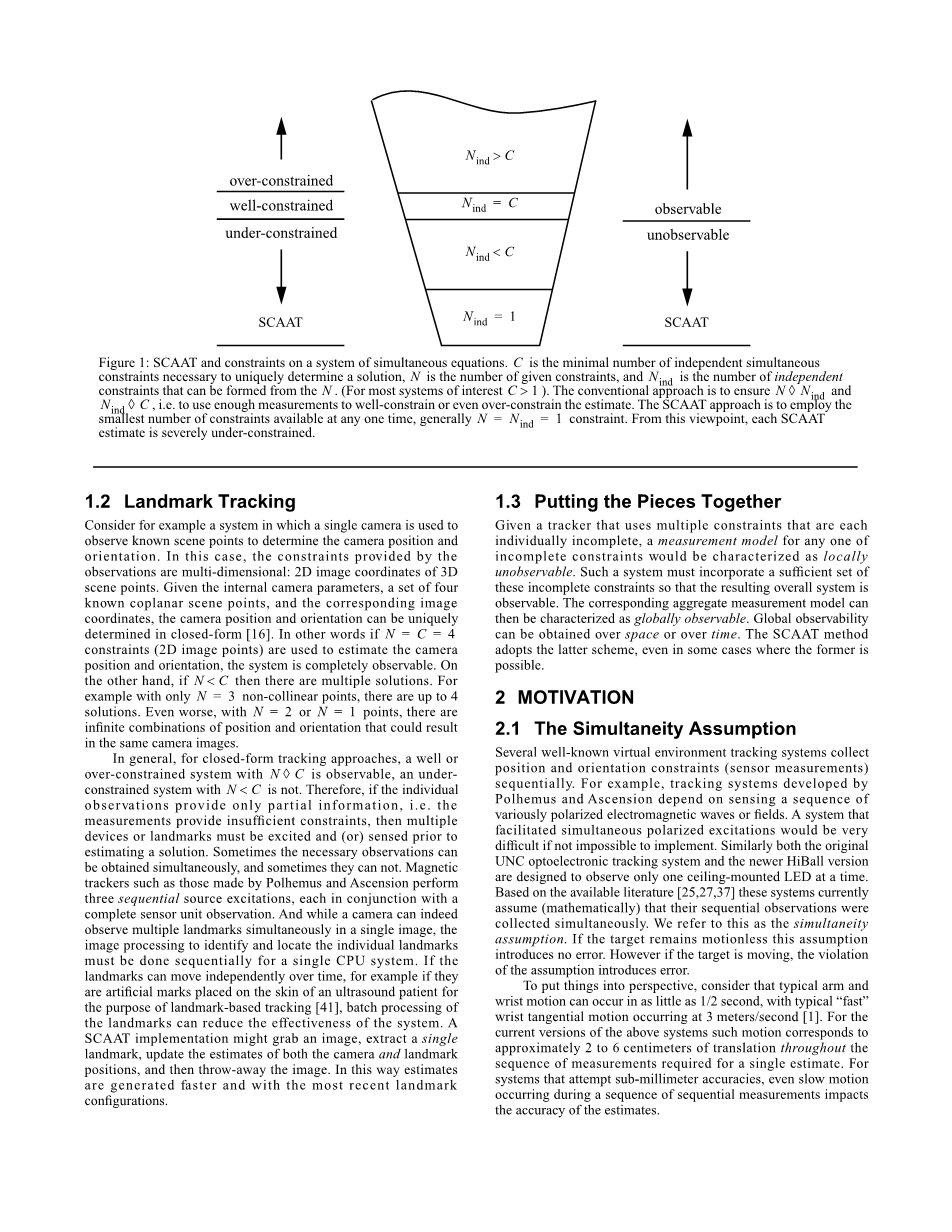
观测性的概念也可以用对被估计的系统的未知参数的约束来描述,例如对系统状态的未知元素的约束。给出一个特定的系统,以及相应的待估计的未知数集,让C被定义为唯一确定解决方案所需的最小独立同时约束数。设N是实际用于生成新估值的数,以及 是可以由约束形成的独立约束的数量。对任何ge;约束,如果=这个模型就恰好被约束,如果>就是过量约束的,如果 <它是不受约束的。(见图1)
-
- 地标跟踪
例如,考虑使用单个摄像机来观察已知的场景点以确定摄像机的位置和方向的系统。在这种情况下,观测所提供的约束 是多维的:三维场景点的二维图像坐标。给定摄像机的内部参数,一组已知的四个共面场景点,以及相应的图像坐标,摄像机的位置和方向可以在封闭状态下唯一确定[16]。换句话说,如果==4约束(2D图像点)来估计摄像机的位置和方向,则这个系统是完全可以观察到的。另一方面,如果<那么有多种解决方案。例如,只有=3非共线点,有最多4个解。更糟的是当=2或者=1点,有无限的位置和方向的组合,可能导致相同的相机图像。
一般来说,对于封闭形式的跟踪方法,具有良好或过度约束ge;的系统是可观测的。而不受约束的系统<则不能观测到。因此,如果单个观测只提供部分信息,即测量提供的约束不足,那么多个设备或地标必须被激发和(或)感知。在估计解决方案之前。有时可以同时得到必要的观测,有时却不能。磁力跟踪器,如Polhemus公司和扬升公司生产的磁力跟踪器,执行三个连续的源激励,每个都与一个完整的传感器单元观测相结合。虽然相机确实可以在一幅图像中同时观察多个地标,但图像要识别和定位单个地标,必须对单个CPU系统进行顺序处理。如果地标可以随时间独立移动,例如,如果它们是放置在超声波病人皮肤上的人造标记,用于标记式跟踪[41],批量处理标志会降低系统的有效性。SCAAT实现可能获取图像,提取单个地标,更新相机和地标位置的估计,然后排除图像。这样,生成估值的速度就会更快,并且具有最大的参考价值和最新的标记配置。
-
- 综述
如果一个跟踪器使用多个约束,每个约束都是单独不完整的,则任何一个不完全约束的度量模型都将被描述为局部不可观测。这样的系统必须包含足够的这些不完全约束,这样才能观察到整个系统。相应的聚合度量模型可以描述为 在全球范围内是可以观察到的。可以通过空间或时间获得全局可观测性。SCAAT方法采用后一种方案,即使在可能的情况下也是如此。
- 目的
2.1同时性假设
几种著名的虚拟环境跟踪系统有序地收集位置和方位约束(传感器测量)。例如,Polhemus和Ascens开发的跟踪系统 离子依赖于探测一系列不同极化的电磁波或磁场。一个促进同时极化激发的系统如果即使不是不可能的,也是非常难以实现的。同样,最初的UNC光电跟踪系统和较新的Hiball版本一次性只能观察一个天花板上安装的LED。根据现有文献[25, 27,37]这些系统目前(从数学上)假定它们的连续观测是同时收集的。我们称之为同时假设。如果目标保持移动 这个假设没有引入错误。然而,如果目标移动违反假设会导致错误。为了使结果更加清晰,需要考虑典型的手臂和手腕运动可以发生在1/2秒内,典型的“快速”手腕切向运动发生在3米/秒[1]。对于上述系统的当前版本,这种运动相当于一次估计所需的测量序列中大约2至6厘米的平移。对于试图达到亚毫米精度的系统,即使是在连续测量过程中发生的慢动作也会影响估计的准确性。
当尝试任何形式的系统自动校准时,由于违反同时性假设而引入的误差是最值得关注的。戈特沙尔克和休斯注意到了他们。为了避免这种错误,必须严格限制自动校准程序[19]。考虑一下,对于总测量时间为30毫秒的多个测量系统来说,运动是有速度的。运动必须限制在大约1.5厘米/秒,以限制平移(整个测量序列)到0.5毫米。对于大范围(广域)跟踪系统的完全自动校准,这种限制会导致较长的特殊变形。
2.2设备隔离和自动校准
利用对源和传感器缺陷的了解,可以提高跟踪系统的精度。虽然内部传感器参数通常可以离线确定,例如由制造商确定,对于外部参数来说,情况通常不是这样的。例如,考虑到磁传感器的坐标系位于传感器单元内的某个未知位置,很难确定混合系统中各个传感器之间的精确几何关系。同样,视觉系统中使用的可视地标之间的精确几何关系,往往很难确定。更糟糕的是,地标位置会随着时间的推移而改变。例如,病人的皮肤会随着超声波探头的压力而变形。一般来说,诸如灵活性、易用性和较低的成本等目标,会使自我校准或自动校准的概念更具吸引力。
自动校准的一般想法并不新鲜。例见[19,45]。但是,由于SCAAT方法隔离了每个传感器或模式提供的测量,因此该方法提供了一个新颖的方法,同时自动校准跟踪。由于SCAAT方法隔离单个测量或测量尺寸,单个源和传感器缺陷更容易识别和处理。此外,由于避免了同时假设,第2.1节中讨论的运动限制将被取消,并且可以完成自动校准。 同时跟踪目标。
即使通过多维度量同时获得约束,SCAAT方法强制执行的隔离也可以优化结果。一个直观的解释是如果元素(维数)被独立的噪声破坏,然后独立地合并元素可以在批量或集成估计方案上提供改进的滤波。
2.3时间改进
根据Shannon采样定理[24],测量或采样频率应至少是真实目标运动带宽的两倍,否则估计器可能无法跟踪真实运动。鉴于一般手臂和头部运动带宽规格范围为2~20 Hz[13,14,36],采样率理想应大于40 Hz。此外,估计率应尽可能高,这样才能将正态分布的白色估计误差与在发生重大事故时可能观察到的任何非白色误差区分开来。因此,估值将始终反映最近的用户状态。
除了提高估计率外,我们还希望减少与产生改进估计值相关的延迟,从而减少目标运动与视觉反馈之间的整体延迟。 在虚拟环境系统中[34]。如果延迟太高,这种潜伏期会产生适应和存在的错觉[22],并可能引起运动不适或疾病。延迟时间的增加也会导致头挂载显示不准确的问题。[23]和运动预测[4,15,29]的问题。最后,有时使用后绘制图像偏转技术来解决渲染管道中的延迟可变性问题。[32,39]有了准确的预测,最佳的位置和方位信息可以用来渲染一个初步的图像。随着跟踪器的快速更新,有更高的概率会使初步图像准备最终偏转时最近的用户运动已经检测到并纳入到偏转。
考虑到这些需求,我们会检查测量对估计延迟和速率的影响。让 成为确定一个约束所需的时间。例如,为了测量传感器或提取场景地标,让用于计算一个完整估计的(顺序)约束的数目,以及是实际计算估计值所需的时间。然后估计潜在因素和速率为
随着约束数的增加,方程(1)显示了估计延迟和估计速率分别是如何增加和减少的。例如Polhemus FasTrak,他使用SPASYN(空间同步) 确定相对位置和方位的方法,采用=3的顺序电磁激励和估计测量[25,27,37]最初北卡罗莱纳大学(UNC)光电跟踪系统按估计数连续观测10le;le;20信标[3,44],以及目前的UNC混合地标-磁跟踪系统从相机提取图像,然后纳入=4地标每次更新。
SCAAT方法试图通过使用每一个新的(个别)约束更新当前的估计值,即将固定在1上,从而改善这类系统的延迟和数据速率。换句话说,它增加了将估计率近似于可以获得单个约束的速率,并同样将估计延迟缩短为获得单个约束所需的时间。例如,执行单个传感器的单个测量,或提取单个地标。
图2用一个时序图说明了数据速率的增加,该图将SPASYN(Polhemus导航系统)磁位和方位跟踪系统与假设的SCAAT进行了比较。与SPASYN系统不同的是,SCAAT的实现将在感知每个单独的激励向量之后产生一个新的估值,而不是等待一个完整的结果。
2.4数据融合与混合系统
卡尔曼滤波[26]在数据融合中得到了广泛的应用。例如,在导航系统[17,30],虚拟环境跟踪系统[5,12,14]和三维场景建模[20,42]中。然而,SCAAT方法是一种新的基于卡尔曼滤波的多传感器数据融合方法。由于约束是有意一次合并的,所以可以选择添加哪些约束,以及什么时候添加它们。这意味着来自不同传感器或模式的信息可以 以共同、灵活和迅速的方式编织在一起。此外,我们可以使用这种方法来确保 每个估计都是根据最近获得的约束计算的。
考虑联合国大学混合地标-磁力在SIGGRAPH 96[41]的展示。该系统使用现成的扬升磁跟踪系统和基于视觉的地标识别系统。 在增强现实辅助医疗程序中实现更优的合成图像配准和真实图像配准的系统。基于视觉的组件试图在一幅图像中识别和定位多个已知的地标,然后再对磁读数进行校正。相反,SCAAT实现每次使用一个新的图像(帧)来识别和定位每个更新中的一个地标。 这种方法不仅会增加基于地标的校正的频率(考虑到必要的图像处理),而且还将提供额外的好处,而不像 [41]对于有形地标数量低于确定完整位置和定向解决方案所需数量的情况,不需要进行特别处理。SCAAT的实施将简单地循环通过任何可用的地标。即使只有一个可见的地标,该方法仍将继续正常运行,利用地标观测所提供的信息,在可能的情况下改进估计,但同时会增加不确定性。
3 方法
SCAAT方法以一种不寻常的方式使用卡尔曼滤波(KF)。卡尔曼滤波是一种数学过程,它为最小二乘法提供了一种高效的计算(递归)方法。 线性系统的模拟它以预测校正的方式这样做,使用动态模型预测状态的短期(自上次估计以来)的变化,然后用测量和相应的测量方式对它们进行校正。扩展卡尔曼滤波(EKF)是卡尔曼滤波的一种变化,它支持非线性系统的估计,例如三维位置和方位变换控制系统。关于卡尔曼滤波器的基本介绍见[
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[432852],资料为PDF文档或Word文档,PDF文档可免费转换为Word

