英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
模糊控制器应用于无级变速电动汽车传输
Marcelo A.C. Fernandes
巴西纳塔尔UFRN,Rio Grande do Norte联邦大学技术中心计算机工程与自动化系
文章信息:
文章历史:
2015年7月23日收到
以修改后的格式收到
2015年12月29日
2016年6月17日接受
魏国良魏传
2016年6月23日在线提供
摘 要
本文提出了配备无级变速器(CVT)的电动汽车(EV)的能效控制策略。 该策略基于模糊控制器,该模糊控制器直接作用于CVT系统的比率,并以最大效率电机转速作为参考。 与以前的建议不同,该项目涉及开发更精确的系统,该系统优化了PMDC电机的最大效率功能,以用作控制器的参考。 提供了系统的完整表征,以及使用车辆采用的不同类型路线的仿真建模结果。
关键词:电动汽车,无级变速器,模糊控制器,能源效率
1.介绍
无级变速器(CVT)系统能够连续调节车辆的传动比,以实现车辆所需动力和电机功率之间的最佳关系。它允许在最小化工作(最大化经济)或最大化动态之间进行选择。 CVT的主要目标是通过连续调节传动比将电机的功率可靠地传递到转向系统,从而使电机以最高的效率和经济性运行。控制传动比的策略在CVT系统中至关重要,控制算法的性质直接与CVT性能有关[7,23,29,32,3]。最近的研究描述了与车辆驱动相关的CVT系统的控制技术通过电动机(电动车辆 - EV)或混合动力车辆(电动和燃烧电动机)[11,27,14,10,8]。对于EV,可以使用交流(AC)或直流(DC)电动机。后者包括永磁直流(PMDC)电机,其中通过感应电压和电机旋转之间的线性来促进速度控制[28,17]。诸如摩托车,小型车和移动机器人等小型电动车辆可以使用与CVT系统耦合的PMDC电机,这可以降低功耗[6]。模糊控制器(FC)已经广泛用于与电子相关的子系统和燃烧车辆。实验结果表明,与传统的比例 - 积分 - 微分(PID)控制器相比,基于模糊逻辑的控制器提供了优越的性能,尤其是涉及CVT系统[24,25,19,4]早期的研究[12,9,5,13,4]提出了适用于CVT系统的各种FC方案,但与获得结果时未考虑与电动机和车辆类型有关的因素。几篇文献[24,26,25,15]已经描述了FC方案,用于改变直接作用于混合动力车辆的CVT系统的PI和/或PD控制器的增益;虽然目的不是为了达到最大的电机效率,但为了仿真整个系统获得了结果。 Asaei等人[2]描述了使用与CVT系统相关的FC来控制内燃机(CE)的操作,其中控制器采用三个模糊集合并试图将CVT调节到CE所需的最佳扭矩。周等人[31]为了调整CVT控制系统的响应,使用了一个并行FC,而Montazeri-Gh和Asadi [18]提出了一种用遗传算法优化的FC策略。最后,Naderi等人在文献[19]提出了一种使用CMOS技术实现用于控制CVT系统的FC的提议。与文献中描述的以前的工作不同,本研究提出了一种用于CVT系统的模糊控制器策略,该策略总是搜索最大点PMDC电机的效率。电机的效率功能是建模和最大和机械参数。为了最大效率,控制系统实时计算PMDC的最佳转速(这里称为参考转速),以便从输入功率中获得最大效率,并且该转速被用作模糊控制器的参考,该模糊控制器与CVT系统,该系统反过来试图最小化参考旋转和实际旋转之间的误差。为了证明所提出的技术在不同路线情况下的效率,给出了仿真结果。
2. 系统建模
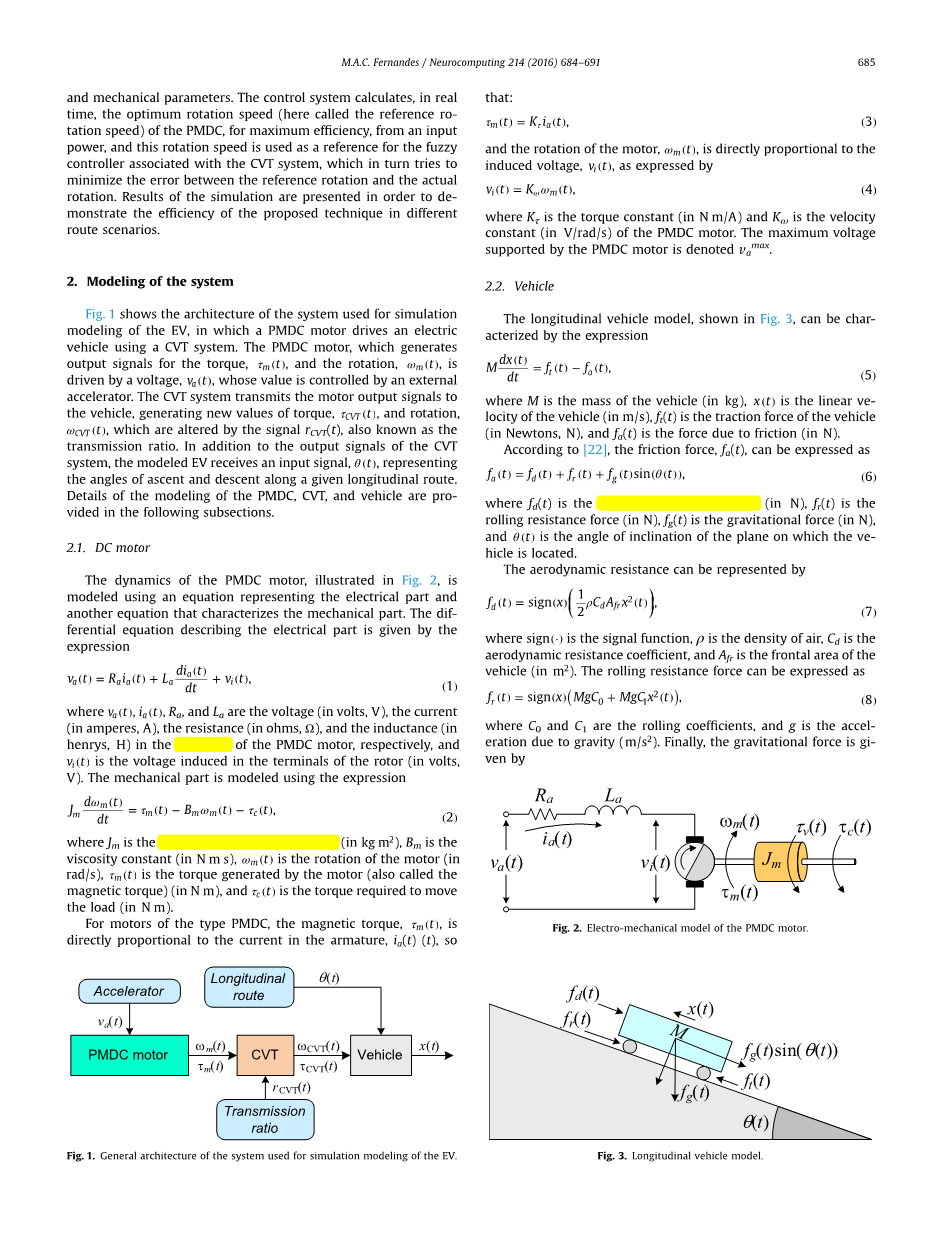
图1示出了用于EV的仿真建模的系统的架构,其中PMDC电机使用CVT系统驱动电动车辆。 产生转矩和旋转的输出信号的PMDC电机由电压Vta(t)驱动,其值由外部加速器控制。 CVT系统将电机输出信号传输到车辆,产生新的转矩值(t)和旋转,这些值由信号(t)改变,也称为传动比。 除了CVT系统的输出信号之外,建模的EV还接收输入信号theta;(t),表示沿给定纵向路线的上升和下降角度。 PMDC,CVT和车辆的建模细节在以下小节中提供。
2.1. 直流电机
图2中所示的PMDC电机的动态特性使用表示电气部分的等式和表征机械部分的另一个等式来建模。 描述电子部分的微分方程由表达式给出:
=
一个,一个,和是电压(单位为伏特,V)(以安培A表示),电阻(欧姆,Omega;)和电感(英寸)henrys,H)分别位于PMDC电机的电枢中是在转子端子处感应的电压(以伏特,V)。 机械部分使用表达式进行模拟。
=--
其中是转子的转动惯量(单位为kg m 2),是粘度常数(N m s),是电机的转动(in rad / s),是由电机产生的扭矩(也称为磁力矩)(N m)和是移动所需的扭矩负荷(以N m为单位)。
对于PMDC型电动机,磁力矩米,是与电枢中的电流成正比,如此:=
和电机的旋转是成正比的感应电压,一是如所表达的。
=
其中是扭矩常数(单位N m / A),Komega;是速度恒定(V / rad / s)的PMDC电机。 最大电压由PMDC电动机支持的电流表示为。
2.2. 车辆
如图3所示的纵向车辆模型可以用表达式来表征
M=-
其中M是车辆的质量(以kg为单位),是线性ve(m / s),是车辆的牵引力(牛顿,N),是摩擦力(N)。
根据[22],摩擦力可以表示为
其中是空气动力学摩擦力(N),是滚动阻力(N),是重力(N),theta;(t)是ve平面上的平面的倾斜角度。
空气动力学阻力可以用下式表示
其中符号是信号函数,rho;是空气密度,是空气动力学阻力系数,而是前缘区域车辆()。 滚动阻力可以表示为
其中和是滚动系数,g是重力引起的加速度(m / )。 最后,引力是g
通过
2.3. CVT传输
图4示出了CVT系统模型的示意图,其中,PMDC和车辆之间的传动比被表示为
其中和分别为主旋转和扭矩,而和分别为次旋转和扭矩,传动比在和之间变化。 在这个模型中,没有考虑与CVT传动相关的机械损失。 基于早期的研究[23,16],CVT系统的动力学可以用等式表示
其中tau;m (t) in是电机产生的转矩,tau;m (t) out是由负载(在本例中为车辆)产生的转矩和J CVT p和J CVT s代表与之相关的惯性矩变速器的主要部分和次要部分。
根据图1所示的系统,可以发现,tau;tau;(t)=(t)t t以m为单位,omega;omega;(t)=(t)t CVTpm,tau;(t)=(t)t tCVT CVTs和omega;omega;(t)=(t)t tCVT。
3.控制策略
图5示出了控制策略的结构框图,其中通过CVT系统实时调节电动机的旋转omega;(t)tm(改变比率r CVT(t))与单个加速度条件(换句话说,使用一个单独的电枢电压值)相关的最大效率omega;(t)t ref。(t))vt a。所提出的模糊控制器采用模糊PI策略,其中模糊系统的输入通过误差e(n)(通过调整因子G e加权)以及误差ed(n)(n)(通过调整因子G d加权) )。对于输出,控制器生成增量/减量信号s(n),其变化量为plusmn;G u,这些信号应用于CVT系统的比率r CVT(n)。控制器输入信号omega;(t)tm和(t)vta以ts秒的速率离散化,输出信号r CVT(t)由驾驶员根据离散化的传动比值r CVT (N)。经典PI控制器根据误差信号e(n)改变控制动作r CVT(n),误差积分可表示为
其中k p是比例增益,k i是积分增益[20]。方程的离散近似。(13)可以表示
其中t s是以秒为单位的时间,n是时刻。模糊控制器称为模糊PI,表示为
其中G e,G d和G u是缩放增益和(·)F模糊映射函数[21,30]。线性化
v(n)等式 (16)可以表示为
其中G n是化因标准子,并且
比较方程 (14)和(18),模糊PI可以类似于PI控制器
和
PMDC的效率(·)e f的计算可以表示为
操作等式。(1) - (4)使方程(21)仅作为变量omega;m和v a的函数被重写:
为了获得作为产生PMDC的最大效率的函数的omega;m的曲线函数,(t)f vmax a,(·)e f被导出用于omega;m并且等于零,
方程式的两个根源 (23),然后找到,表示为
和其中
使用Eq(4)作为基础,可以发现方程 (26)反映了与PMDC有关的损失,并且根omega;[] m 1可以被丢弃,因为它的使用导致效率值大于1。式。 (25)因此是函数(t)f v max a,即omega;omega;[] = m ref 2,如图5所示。 (25)等式 (23)能够识别最大效率点,ef max,用以表示
4.模糊系统项目
图6说明了与输入变量^(t)e n和^(t)e nd相关的隶属函数,以及用于输出变量v(n)的隶属函数。 输入变量和输出变量都使用同一组函数,并由两个梯形函数(极值)和五个三角函数(其余部分)组成。 与会员资格相关的语言术语
功能为大负(LN),中等负(MN),小负(SN),零(ZZ),小正(SP),中等正(MP)和大正(LP)。
表1给出了在Mamdani推理过程中使用的一组模糊规则,以便将输入变量^(t)e n和^(t)e nd与输出变量v(n)相关联。 输入和输出之间的所有链接都使用连接器AND。
图7说明了输入和输出v(n)(模糊映射函数(·)F,模糊)之间的关系: 1和隶属函数,如图6所示。该曲线是使用蕴涵步骤中的最小操作,聚合步骤中的最大值以及去模糊化步骤中的质心方法获得的。
5.模拟和结果
为了验证该提议,Matlab / Simulink仿真使用由电机,CVT和车辆组成的系统模型(根据第2节中的方程)进行。 表2列出了与PMDC电机,CVT系统和车辆参数相关的数值。 基于公式 (27)和表2中的数据,仿真电机的最大效率ef max为0.8449。
使用表2中给出的参数,仿真由三种不同的路线(Ro 1,Ro 2和Ro 3)组成。 结果如图1和2所示。8-20。 在Ro 1中,EV沿着无倾斜的路径(theta;(t)= t 0)移动600秒,而PMDC的馈送(车辆的加速度)根据图8所示的曲线而变化 在Ro 2中,电枢电压va(t)保持固定在110 V,持续600 s,而路径的倾角theta;(t)变化。
最终,在路线Ro3中,电枢电压va(t)和路线倾角theta;(t)根据图16和17中所示的轮廓而变化(对于600S)。
对于所有仿真,结果都是针对模糊PI控制器(见公式(15))和PI控制器(见公式(14))生成的。 PI控制器参数(k p和k i)使用ZieglerNichols方法[20]进行调整,并调整模糊PI控制器。使用方程 (19)和(20)。 为了在-1和1之间对模糊输入变量^(t)e n进行归一化,G e参数计算为
其中e max是最大误差值。 G n参数恰好等于0.5,使v(n)落入-1和1之间的区间.G u = 0.005值用公式(20)中的ts,G e,G n和ki参数计算得到)。 最后,G d = 1值是使用公式(20)中的G e,G n和k p参数计算出来的。
对于Ro 1获得的结果详细描述于图2和3中。 图9,10和11分别显示了PMDC的转速,CVT的传动比和PMDC的效率。发现PMDC的转速omega;(t)tm,
在r CVT的变化(图10)之后紧跟参考omega;(t)t ref(图9),导致效率曲线非常接近整个路线上的最大效率ef max(平均误差 在ef(t)和ef max之间为0.025%)。
图13,14和15分别示出了路径Ro 2的PMDC的旋转速度,CVT的传动比和PMDC的效率。 相对于参考值(omega;(t)t ref),这种情况的结果显示出更大的变化和ef max),与路线Ro 1的模拟相比较。 如图13所示,PMDC电机转速omega;(t)tm相对于参考omega;(t)t ref(固定在95.04 rad / s)的误差约为7.35%。 然而,重要的是要强调,测量效率ef(t),其最大化是控制器的主要目标,相对于参考值ef max,显示出约0.6%的小差异,如可以看到的 图15.传动比的差异,如图14所示,
全文共13381字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15298],资料为PDF文档或Word文档,PDF文档可免费转换为Word

