英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
用于长距离光网络的EDFA基于软件增益控制的设计和实现
Ozcan Akcesme, Murat Yucel * , Mustafa Burunkaya
土耳其Gazi大学技术学院电气电子工程系
Yenimahalle,
06500 Ankara,
Turkey
关键词:增益控制,EDFA,平坦收益,光网络。
摘要
掺铒光纤放大器(EDFA)的光学增益光谱在C波段区域具有非线性结构。因此,当使用光放大器链时,换句话说,当连续进行放大时,在某些波长处获得的增益值会有所不同。因此,在长距离光网络中,一些波长将被减少,并在到达接收端之前消失。为了克服这个问题,我们试图使所有使用的波长的增益值达到相同的水平。在电子方面,动态增益值是通过控制泵浦激光器的功率来实现的。 泵浦激光器是根据包括电流和温度两个参数来控制的。这项研究设计了一个工作在C波段的EDFA,并实现了一个可以控制该EDFA增益的电子板和通过计算机控制的软件。最后,实现了对工作在C波段的EDFA增益的自动控制,增益波纹值的范围为 0.17-0.30 dB。
1.绪论
光纤放大器在延长光纤通信系统的距离和传播这些通信系统方面起着最重要的作用。光纤电缆中损失最小的信号波长是1550纳米,包括这一波长的常规波段(C波段1530-1565纳米)在光纤网络中普遍使用。在这个波长范围内最有效运行的光放大器是EDFA。EDFAs以其高增益、低噪声和高效率的特点作为首选。然而,EDFA的光学增益光谱在C波段区域有一个非线性结构。因此,当使用光放大器链时,在每个波长上获得的总增益值会有所不同。因此,一些波长将被降低,并在到达接收端之前消失。因此,增益平坦化在光纤放大器的应用中是非常重要的。此外,在密集波分复用(DWDM)等应用中,EDFA具有平坦的增益是非常重要的,它可以增加光纤通信的带宽。EDFAs的非平坦增益光谱限制了系统带宽。为了从同一根光纤中传输更多的通道,需要一个平坦的增益和更宽的带宽。人们试图通过使用添加剂,如碲化物、除铒之外的磷和铝,以各种配置操作EDFA,以及使用增益平坦滤波器和光纤布拉格光栅来使输出增益光谱平坦。除此以外,人们还关注单通EDFA、两级EDFA、双通EDFA或多通EDFA[12,13],用可变光衰减器(VOA)调整和压平总增益,建议通过使用长周期光纤光栅来平坦EDFA的增益,建议使用基于负反馈环路的半导体光放大器(SOA)来调整EDFA的泵浦功率,用光纤环形镜检查全光增益箝制的EDFA。通过在级联EDFA中增加/减少通道来控制通道,通过弯曲长周期光栅来调整每个波长的往返损耗来控制全光增益控制EDFA的增益。通过使用环形谐振器和两级系统实现双通L波段EDFA的增益控制,通过使用光延迟线减少动态增益波动,开发了高速自动增益控制EDFA,通过在两级EDFA中用快速链接控制通道控制每级的中间衰减和泵浦功率,获得了平坦的增益和恒定的输出功率,不受流动损耗和通道数量的突然变化影响。Yuuml;cel和Yenilmez通过光纤模拟程序,在两根光纤之间沿C波段放置增益平坦滤波器(GFF),并在第二根光纤末端放置均匀的光纤布拉格光栅(FBG),从而优化了整个系统的增益光谱,以达到平坦的增益光谱。通过所提出的系统,除了增益的平坦化外,还观察到由于1530-1565纳米范围内每个波长的ASE更好,噪声系数也降低了,尽管它的抑制作用很小。总之,在这项研究中,通过在C波段的两级系统中使用GFF和FBG,获得了约26.04 dB的总增益和约0.68 dB的纹波系数。整个系统的增益谱是完全由光学控制的,没有电子控制。
在这项研究中,首先设计了一个EDFA,设计并实现了泵浦激光器驱动电路。其次,通过控制泵浦激光器的功率进行了基于软件的控制,并在C波段实现了平坦的增益谱。最后,使用软件对EDFA进行了实时监控,并确保了增益在C波段上保持恒定。第二章解释了EDFA的增益平坦化技术,第三章解释了设计和软件的实现。在最后一章中讨论了结果。
2.EDFAs中的增益控制
当检查EDFA的增益光谱时,可以看到有两个外观不同的小峰形成。因此,由EDFA放大的信号的功率之间出现了差异。这些差异导致了信号的失真,进一步降低了信噪比,传输距离也随之减少。因此,EDFA的增益光谱应该被拉平。
在EDFA中,增益平坦化主要通过两种方式进行:光学和电子。用环形激光器结构进行全光增益控制,用光纤布拉格光栅进行全光增益控制,以及使用增益平坦化滤波器,在光学增益平坦化中走在了前列。在环形激光器结构中,反馈环形激光器被用于增益控制。在这里,反馈回路只包括一些无源、全光器件。在找到用于增益控制的环形激光器结构后,一种具有良好增益钳制效果的简单设计。这就是所谓的FBG配置。一对FBG被放置在一个传统放大器的前后。滤波器的基本操作是FBG的在布拉格波长处反射光信号。使用一个增益平坦的滤波器,在高增益波长上的增益被降低,并试图平坦输出增益光谱。在这些方法中,增益控制是完全在光学介质中进行的,没有任何光的作用。完全在光学介质中进行,没有任何光电子转换。然而,这些在光学介质中进行的平坦化研究是复杂和昂贵的。此外,对于用户来说,调整所需的光输出功率也不符合人体工程学。相反。可以使用简单、便宜、更容易控制的电子增益控制技术。在这项研究中,EDFA的输出增益是通过电子方式控制的。为此,需要首先设计激光驱动板。
3.激光驱动器的设计
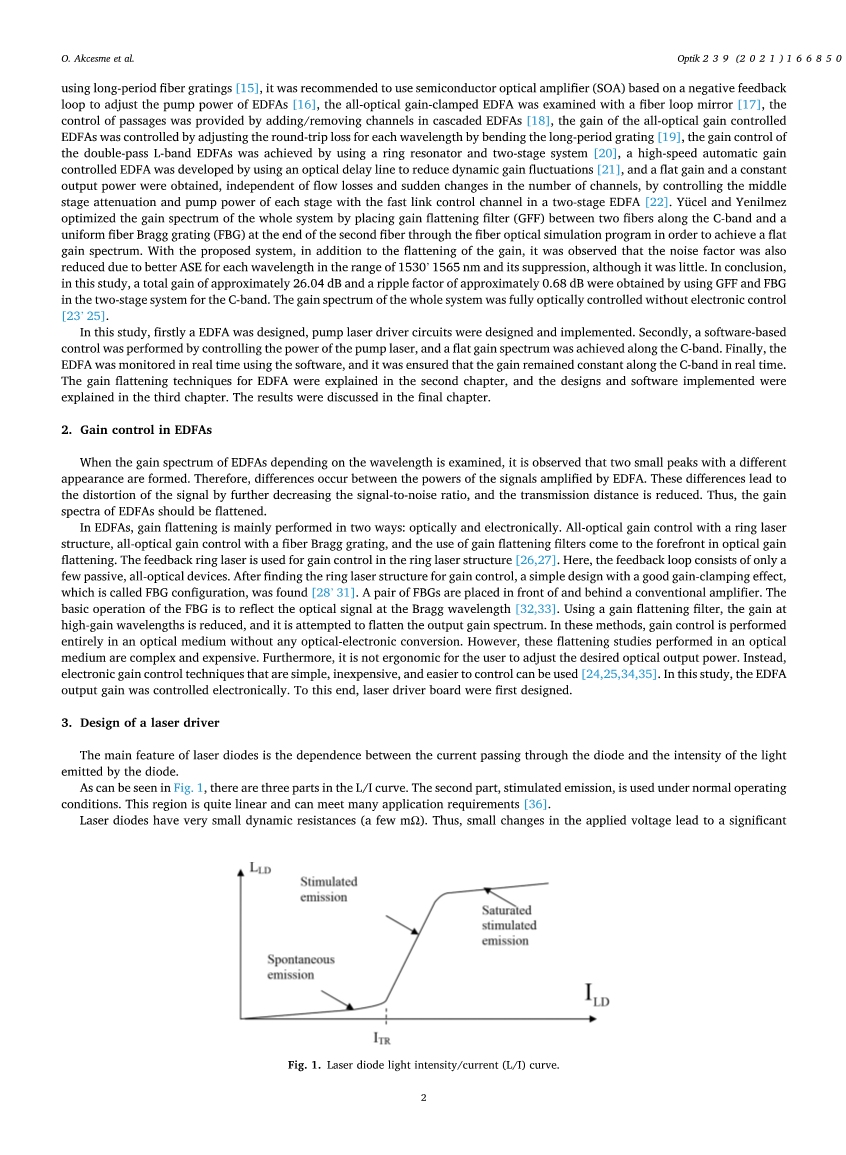
激光二极管的主要特点是通过二极管的电流与二极管发出的光的强度之间的关系。
从图1中可以看出,L/I曲线有三个部分。第二部分,刺激发射,在正常工作条件下使用。这个区域是相当线性的,可以满足许多应用要求。
激光二极管的动态电阻非常小(几mOmega;)。因此,应用电压的微小变化会导致激光器流过的电流发生重大变化。因此,应用于激光器的电功率主要取决于通过激光器的电流,因为二极管的电压大部分是恒定的[36]。
为了使激光二极管正常工作,应该控制两个基本参数。它们是激光二极管的温度和电流控制。在电流控制中,应快速检查激光二极管的电流,以控制激光的光输出功率。通过测量落在与激光器串联的电阻上的电压,可以发现通过激光器的电流。作为反馈的电流值再次循环,激光器的电流就会保持在所需的水平上(图2)。
在温度控制中,温度应保持恒定在某一数值,以便激光器在固定的波长下提供光学输出。利用激光二极管模块中的热电冷却器(TEC)和热敏电阻等元件,必要时加热,必要时冷却,使激光器保持在一个恒定的温度。
用于驱动激光二极管的电流驱动器主要分为线性功率放大器和开关电源。虽然线性放大器可以使用到1 A,但开关电流驱动器是首选,因为线性放大器的效率在1 A之后明显下降。开关电流驱动器由于其高效率和高电流驱动能力,在1 A之后的应用中经常是首选。在设计不良的开关电流源中出现的纹波和不需要的频率成分会导致激光器产生的光功率的稳定性问题。
在本研究开发的激光器温度驱动器中,由于蝶形激光器模块中内置了TEC,因此确保了激光器在所需温度下保持恒定。光学应用中的目标温度可能从plusmn;0.02◦C到plusmn;0.1◦C不等。在EDFA中,目标温度通常在plusmn;0.2◦C至plusmn;0.5◦C之间。
图3是一个显示了TEC是如何被控制的框图。这里,第一个部件是热敏电阻,被用作温度传感器。这个传感器嵌入在蝶形激光器中,用于测量激光器的温度。通过比较根据温度测量电路的信息而设定的目标温度,它被传送到 '热负荷补偿 '模块,TEC被加热或冷却以确保温度保持在目标水平。
TEC控制器可以根据输出模式分为两种,即线性模式和开关模式。尽管线性模式的TEC控制器的设计和制造很简单,但其能源效率在20%到40%之间。开关型TEC控制器的效率可以达到90%。然而,它们需要两个大功率的线圈和具有低等效串联电阻值的电容器来过滤输出中的波动。
本研究中要使用的蝶形激光器的TEC电流值可以达到3 A。因此,在此应用中,首选开关模式的H桥驱动器。在选定的驱动器可以通过电压控制后,H桥可以在数模转换器(DAC)的帮助下从微处理器控制。同样,从热敏电阻接收到的电压信息用16位模数转换器(ADC)送到微处理器后,该信息用自适应PID控制器控制,确保温度在plusmn;0.05◦C范围内保持恒定。
已经设计了一个客户端来优化温度稳定性,即调整PID系数并观察结果,并且 在这个客户端的帮助下,已经完成了优化。6级PID系数可以从屏幕底部的表格中同时观察。可以从屏幕底部的表格中同时观察6级PID系数。从图4可以看出,6级自适应PID的系数可以在 '设置PID增益 '中调整 部分进行调整。在调整了新的系数后,借助于屏幕上方的图表观察这些系数的效果。重复同样的过程,直到达到plusmn;0.05 ◦C的范围,实现所需的温度稳定性。
表1显示了在激光二极管的2小时内拍摄的16044个温度数据的分布。在记录这些数据时,激光电流被设定为150毫安,目标温度被设定为25◦C。从表中可以看出,读取的温度值没有超过plusmn;0.05◦C的目标温度波动,表明为EDFA应用提供了足够的温度控制水平。
4.基于软件的自动增益控制系统和结果
图5展示了可以进行自动增益控制的紧凑型EDFA系统。在该系统中,三个基本设备相互通信并执行闭环增益控制。
系统中的可调谐激光源(TLS)被用作产生C波段信号的源,在这个系统中,它被用来 改变输入信号的波长和功率。EDFA控制板承担着控制所建立的EDFA的泵浦激光器的功率的任务。光谱分析器(OSA)是该系统的第三个组成部分,用于 检测EDFA输出端的光信号的波长和峰值功率信息。在图中,所安装的系统可以 根据基于.NET的界面设置的参数,通过控制所有三个设备来控制EDFA的输出功率
根据EDFA的输出功率来控制泵浦功率,即泵浦激光器电流的算法在图6中以流程图的形式呈现。从流程图中可以看出,在控制板读取从OSA收到的EDFA的输出功率并将其与输入系统的目标值进行比较后,通过增加或减少激光电流来确保输出功率达到预期水平。在这里,与普通的线性控制方法不同,采用了自适应线性控制。通过根据误差的大小改变其增加或减少的数量,确保激光电流更快地达到目标。因此,通过更快达到高瞬时偏差的目标输出功率,实现了输出功率的稳定。
在图7中的查找极限选项卡中,根据选定的EDFA的最大和最小激光电流,对调整后的波长和TLS的光输入功率,可以从EDFA的输出端接收的光功率进行自动测量,并在程序中按顺序记录。它确保了EDFA的输出功率可以被控制在所需的范围内,因此,它可以通过调整EDFA可以给出的最小和最大的输出功率来达到目标的低增益波动,以保证在这个标签的主程序循环中测量的增益是平稳的。
在 '输出功率 '标题下收集了三个设置。这里的输入功率下拉列表取自配置标签,并随着测量的继续而添加到自身。该标题下名为 '建议输出功率 '的信息屏幕计算出在选定的输出功率下,在扫描的波长上可以达到的输出功率,作为测量的结果,它反映在屏幕上。
它进行这种计算时,取的是收到的最小功率的最大值和最大输出功率的最小值的平均值。在 '目标输出功率 '部分留下了一个可调节的输入。这里,如果使用该程序的人想选择一个不同于推荐输出功率的值作为目标值,他/她可以通过把它带到这一部分的期望值来实现。用户只能从指定值中选择目标输出功率。例如,在图7中,-5.02 dBm是输入功率为-30 dBm时的最小功率值。用户不允许输入低于该值的数值。因此,其目的是确保EDFA将保持在其可以控制的输出功率范围内。
实验结束后,观察到OSA显示的功率在0.30dBm的稳定性下有一个波动。因此,我们认为应该对紧凑型EDFA进行编程,使读取的峰值功率值保持在目标输出的plusmn;0.30 dBm范围内。在这项研究中,使用了安立公司的MS9710B型号,用分辨率和稳定性更高的OSA可以进一步降低这个值。
因此,在测量中,将增益纹波值低于0.30dB作为成功标准进行评估。
图8是主程序的循环屏幕。在根据上述条件找到极限,并调整了最后调整的输出功率后,通过点击 '主 '选项卡中的 '开始测量 '按钮,创建一个新的线程,并开始进行增益测量。在这个线程根据配置选项卡和查找限制选项卡中指定的数据完成测量后,还将显示增益波动以及所选不同输入功率的最大和最小增益值。除了这些数据外,它还显示经过的时间以及测量的开始时间和结束时间。
当检查表2中的数据时,该系统设法将每个功率输入的增益纹波保持在0.30 dB以下,如上所述。该结果是按照设计的系统获得的。
然而,由于在实践中使用OSA是很困难和昂贵的,为了使系统更经济和不占用空间,用一个连接到由TAP耦合器分离的1%信号的输出部分的PIN二极管来接收输出功率信息,而不是OSA。通过TAP耦合器,用1%的信号获得输出功率信息,并控制激光电流以改变系统固定输出功率目标的增益。由于输入功率在实际应用中也会发生变化,所以输入功率也可以用一个单独的TAP耦合器加入到输入端进行监测,并通过与输出端进行连续比较来确保其在恒定的增益下工作。输出功率或增益可以通过控制设置进行优化,这些设置可以由其他参数控制,如液晶触摸屏的输出功率或为计算机控制开发的接口。
用分接耦合器将输出信号以99-1%的比例分离出来,加入到已建立的EDFA的输出端,并将1%的信号应用到InGaAs PIN二极管的输入端(图9)。
进入PIN二极管的光功率,使用跨阻抗放大器转换成电压,被应用于16位高分辨率的ADC。传输到控制板上的光输出功率信息被输入到嵌入式系统的控制算法中,泵浦激光器的电流被闭环控制(图10)。
根据EDFA的增益值控制泵浦功率的算法,换句话说,就是控制泵浦激光器的电流,以前曾在图6中以流程图的形式呈现。尽管这里使用的闭环算法是相同的,但唯一改变的是EDFA的增益信息是在哪里获得的。
当EDFA控制板处于自动增益控制模式时,使用光功率计和OSA在
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[267340],资料为PDF文档或Word文档,PDF文档可免费转换为Word

