
英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
对极几何与基础矩阵
对极几何是两个视图之间的内在投影几何。它独立于场景结构,仅取决于摄像机的内部参数和相对姿势。
基本矩阵F集中了这种内在几何。它是秩为2的3x3矩阵。如果在第一个视图中将三维空间中的点X成像为x,并且在第二个视图中将Xrsquo;成像为xrsquo;,则图像点满足x#39;TFx = 0的关系。
我们将首先描述对极几何,并导出基本矩阵。然后阐明基本矩阵的特性,用于视图之间的摄像机的一般运动以及几种常见的特殊运动。接下来证明的是摄像机可以从F矩阵恢复到三维空间的投影变换。该结果是第10章中给出的投影重建定理的基础。最后,如果摄像机内部参数是已知的,将证明视图之间的摄像机的欧几里德运动可以从基本矩阵计算到有限数量的歧义。
基本矩阵虽然与场景结构无关,但是它可以仅根据成像的场景点的对应来计算,而不需要知道摄像机的内部参数或相对姿势,该计算在第11章中描述。
9.1对极几何
两个视图之间的对极几何形状基本上是图像平面与以基线为轴的平面铅笔的交点的几何形状(基线是连接相机中心的线)。 这种几何形状通常是通过考虑在立体匹配中搜索相应的点来激发的,我们将从这里开始。
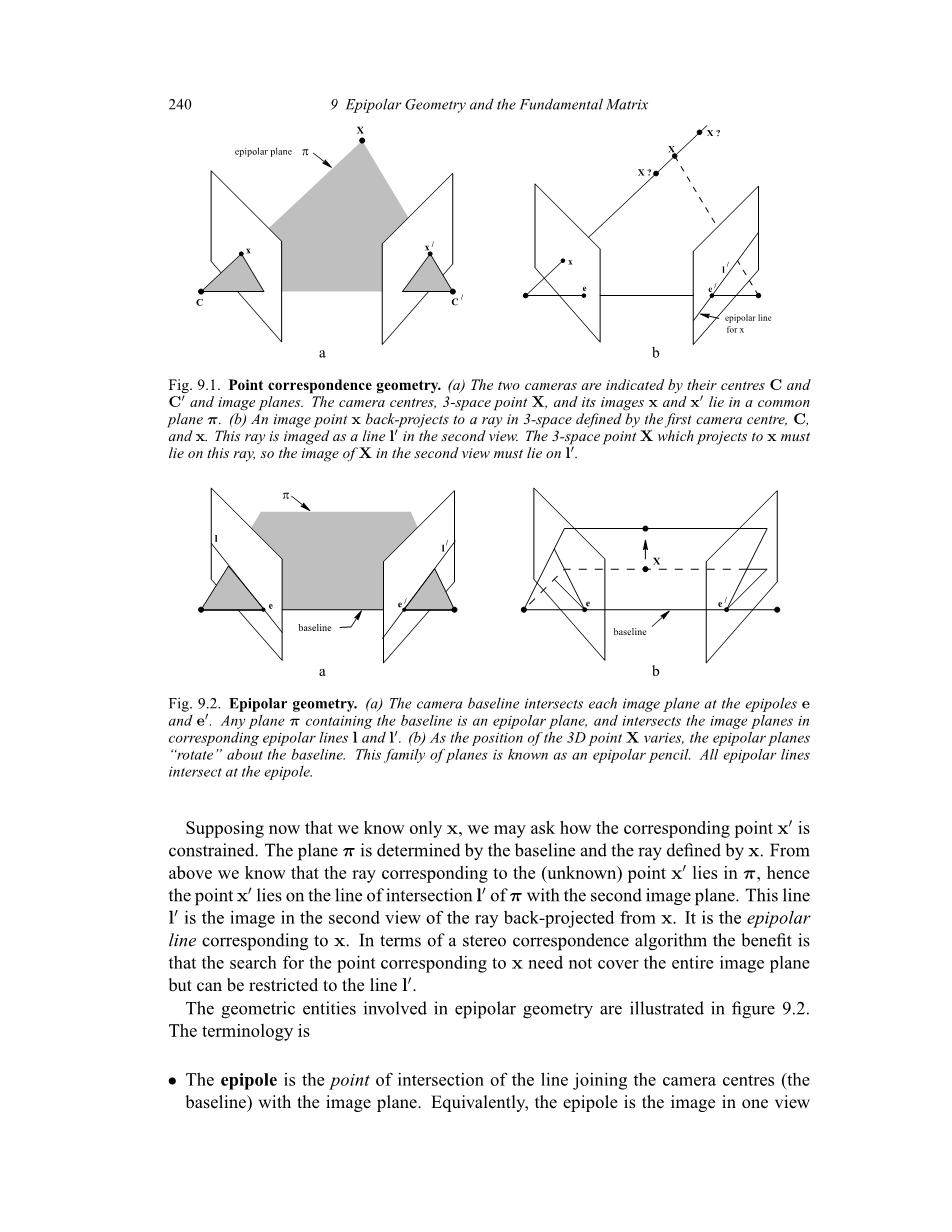
假设三维空间中的点X在两个视图中成像,第一个是x,第二个是x#39;。 相应的图像点x和x#39;之间的关系是什么? 如图9.1a所示,图像点x和x#39;,空间点X和摄像机中心是共面的。 将此平面表示为pi;。 显然,从x和x#39;反投影的光线在X处相交,并且光线是共面的,位于pi;中。 后一种属性在寻找对应关系时最为重要。
图9.1。 点对应几何。 (a)两个摄像机由它们的中心C和C#39;以及图像平面表示。 摄像机居中,3空间点X,其图像x和x#39;位于公共平面pi;中。 (b)图像点x向第一个摄像机中心C和x定义的3个空间中的光线反投影。 该光线在第二视图中成像为线l#39;。 投射到x的3空间点X必须位于此光线上,因此第二个视图中的X图像必须位于l#39;上
图9.2。 极线几何。 (a)摄像机基线与极点 e和e#39;处的每个图像平面相交。 包含基线的任何平面pi;都是极线平面,并且在相应的极线l和l#39;中与图像平面相交。 (b)随着3D点X的位置变化,极线平面围绕基线“旋转”。 这类飞机被称为极线铅笔。 所有极线都在极中相交。
假设我们现在只知道x,我们可能会问对应点x#39;是如何约束的。 平面pi;由基线和由x定义的射线确定。 从上面我们知道对应于(未知)点x#39;的光线位于pi;中,因此点x#39;位于pi;与第二图像平面的交点l#39;上。 该线l#39;是从x反投影的光线的第二视图中的图像。 它是对应于x的极线。 就立体对应算法而言,有益的是,对应于x的点的搜索不需要覆盖整个图像平面,而是可以限制在线l#39;。 对极几何中涉及的几何实体如图9.2所示。 术语是
bull;极点是连接摄像机中心(基线)的线与图像平面的交点。 等效地,极点是另一视图的摄像机中心的一个视图中的图像。 它也是基线(平移)方向的消失点。
图9.3。 聚合相机。 (a)会聚相机的对极几何。 (b)和(c)具有叠加的对应点和它们的极线(白色)的一对图像。 视图之间的运动是平移和旋转。 在每个图像中,可以从对极线的交叉点推断出另一个相机的方向。 在这种情况下,两个极点都位于可见图像之外。
bull;极线平面是包含基线的平面。 有一个单参数族(铅笔)的极线平面。
bull;极线是极线平面与图像平面的交点。 所有极线都在极中相交。 极线平面在极线中与左右图像平面相交,并且定义了线之间的对应关系。
极线几何的例子在图9.3和图9.4中给出。 这些图像对的对极几何,实际上是本章的所有例子,都是直接从图像中计算出来的,如第11.6节(p290)所述。
9.2基本矩阵F
基本矩阵是对极几何的代数表示。 在下文中,我们从点与其极线之间的映射推导出基本矩阵,然后指定矩阵的属性。 给定一对图像,在图9.1中可以看出,对于一个图像中的每个点x,在另一个图像中存在对应的核线l#39;。 与点x匹配的第二图像中的任何点x#39;必须位于核线l#39;上。 极线是从点x到第一相机的相机中心C的光线的第二图像中的投影。 因此,存在从一个图像中的点到另一图像中的对应的核线的映射
x →l#39;
现在将探索这张地图的本质。 结果表明,该映射是(奇异)相关,即从点到线的投影映射,其由矩阵F(基本矩阵)表示。
图9.4。 平行于图像平面的运动。 在平移与图像平面平行的特殊运动的情况下,并且旋转轴垂直于图像平面,基线与图像平面的交点是无限的。 因此,极点处于无效状态,并且极线是平行的。 (a)用于平行于图像平面的运动的对极几何。 (b)和(c)一对图像,其中视图之间的运动是(大致)平行于x轴的平移,没有旋转。 四条相应的核线以白色叠加。 注意,对应点位于相应的极线上。
9.2.1几何推导
我们从基本矩阵的几何推导开始。从一个图像中的点到另一个图像中的对应的核线的映射可以分解为两个步骤。在第一步中,点x被映射到位于核线l#39;上的另一图像中的某个点x#39;。该点x#39;是点x的潜在匹配。在第二步中,获得核线l#39;作为将x#39;连接到极点 e#39;的线。
第1步:通过平面进行点传输。参见图9.5。考虑在空间中的平面pi;不通过两个摄像机中心中的任何一个。通过对应于点x的第一相机中心的光线在点X处与平面pi;相遇。然后将该点X投影到第二图像中的点x#39;。这个过程称为通过平面pi;传递。由于X位于对应于x的光线上,因此投影点x#39;必须位于对应于该光线图像的对极线l#39;上
图9.5。 一个图像中的点x通过平面pi;传送到第二图像中的匹配点x#39;。 通过将x#39;连接到极点 e#39;获得通过x#39;的核线。 在符号中,可以写x#39;=Hpi;x并且l#39;= [e#39;]times;x#39;= [e#39;]times;Hpi;x= Fx其中F = [e#39;]times;Hpi;是基本矩阵。
如图9.1b所示。点x和x#39;都是位于平面上的3D点X的图像。第一图像中的所有这些点xi的集合和第二图像中的对应点x#39;i是射影等效的,因为它们每个在射影上等效于平面点集Xi。因此,存在2D单应性Hpi;将每个xi映射到x#39;i。
第2步:构建极线。给定点x#39;,通过x#39;的极线l#39;和极点 e#39;可写为l#39;= e#39;times;x#39;= [e#39;]times;x#39;(符号[e#39;]times;定义于(4.5-P581))。由于x#39;可以写成x#39;=Hpi;x,我们有
我们定义F = [e#39;]times;Hpi;,即基本矩阵。由此可见
结论 9.1。基本矩阵F可以写为F = [e#39;]times;Hpi;,其中Hpi;是经由任何平面pi;从一个图像到另一个图像的转移映射。此外,由于[e#39;]times;具有秩2和Hpi;等级3,因此F是秩2的矩阵。
几何上,F表示从第一图像的二维投影平面IP2到通过极点 e#39;的极线的铅笔的映射。因此,它表示从二维到一维投影空间的映射,因此必须具有秩2.注意,上面的几何推导涉及场景平面pi;,但是为了使F存在,不需要平面。这里简单地使用平面作为从一个图像到另一个图像定义点图的方法。基本矩阵与通过平面从一个图像到另一个图像的点的转移之间的联系在第13章中进行了深入的讨论。
9.2.2代数推导
根据两个相机投影矩阵P,P#39;的基本矩阵的形式可以用代数推导出来。 以下公式由Xu和Zhang [Xu-96]提出。
通过求解PX = x获得从x反向投射的光线。单参数解的一族由(6.13-p162)给出为
其中P 是P的伪逆,即PP = I,C是其零矢量,即摄像机中心,由PC = 0定义。光线由标量lambda;参数化。特别地,光线上的两个点是P x(在lambda;= 0处)和第一个相机中心C(在lambda;=infin;处)。在第二视图中,这两个点分别由第二摄像机P#39;在P#39;P x和P#39;C处成像。极线是连接这两个投影点的线,即l#39;=(P#39;C)times;(P#39;P x)。点P#39;C是第二图像中的极点,即第一相机中心的投影,并且可以用e#39;表示。因此,l#39;= [e#39;]times;(P#39;P )x = Fx,其中F是矩阵
对于基本矩阵,这基本上与前一部分中导出的基本矩阵相同,单应性Hpi;在两个相机矩阵方面具有显式形式Hpi;= P#39;P 。请注意,在两个摄像机中心相同的情况下,这种推导会发生故障,在这种情况下,C是P和P#39;的共同摄像机中心,因此P#39;C = 0.接下来,F定义为(9.1)是零矩阵。
例9.2。 假设相机矩阵是经过校准的立体声装置,其世界起源于第一台相机
从结果4.3(p582)开始,各种形式如下。 注意,极点(定义为另一个摄像机中心的图像)是
因此,我们可以写(9.2)为
基本矩阵的表达式可以通过多种方式导出,实际上在本书中也会多次推导出。 特别地,(17.3-p412)以4times;4个行列式表示F,该行列式由每个视图的相机矩阵的行组成。
9.2.3对应条件
到目前为止,我们已经考虑了由F定义的映射x→l#39;。我们现在可以说明基本矩阵的最基本属性。
结论9.3。基本矩阵满足两个图像中的任何一对对应点xharr;x#39;的条件
这是正确的,因为如果点x和x#39;对应,则x#39;位于对应于点x的对极线l#39;= Fx上。换句话说,0 = x#39;Tl#39;= x#39;TFx。相反,如果图像点满足关系x#39;TFx = 0,则由这些点定义的光线是共面的。这是点对应的必要条件。
结果9.3的关系的重要性在于它提供了一种在不参考相机矩阵的情况下表征基本矩阵的方法,即仅在相应的图像点方面。这使得能够仅根据图像对应来计算F.我们从(9.1)可以看出,F可以从两个摄像机矩阵P,P#39;计算,特别是F是从摄像机唯一确定的,直到整体缩放。但是,我们现在可以查询从x#39;TFx = 0计算F需要多少对应关系,以及矩阵由这些对应关系唯一定义的情况。这个细节被推迟到第11章,在那里可以看出,通常至少需要7个对应来计算F.
9.2.4基本矩阵的性质
定义9.4。假设我们有两个由具有非重合中心的摄像机获取的图像,则基本矩阵F是唯一的3times;3秩为2的齐次矩阵,其对于所有对应点xharr;x#39;满足
我们现在简要列出一些基本矩阵的属性。最重要的属性也总结在表9.1中。
(i)转置:如果F是这对相机的基本矩阵(P,P#39;),则FT是该对的基本矩阵,顺序相反:(P#39;,P)。
(ii)极线:对于第一幅图像中的任何点x,相应的极线为l#39;= Fx。类似地,l = FTx#39;表示与第二图像中的x#39;对应的核线。
(iii)极点:对于任何点x(除e之外),极线l#39;= Fx包含极点 e#39;。因此,对于所有x,e#39;满足e#39;T(Fx)=(e#39;TF)x = 0。由此得出e#39;TF = 0,即e#39;是F的左空矢量。类似地,Fe = 0,即e是F的右空矢量。
bull;F是具有7个自由度的秩2齐次矩阵。
bull;点对应:如果x和x#39;是对应的图像点,则x#39;TFx = 0.
bull;对极线:
⋄l#39;= Fx是对应于x的极线。
⋄l= FTx#39;是对应于x#39;的极线。
bull;极点:
⋄Fe=0.
⋄FTe#39;= 0.
bull;相机矩阵P,P#39;的计算:
⋄一般相机,F = [e#39;]times;P#39;P ,其中P 是P的伪逆,并且 e#39;= P#39;C,PC =0.
⋄典型相机,P = [I | 0],P#39;= [M | m],
F = [e#39;]times;M = M-T [e]x,其中e#39;= m且e = M-1m。
⋄相机不在P = K [I | 0],P#39;= K#39;[R | t],
F = K#39;-T [t]times;RK-1 = [K#39;t]xK#39;RK-1 = K#39;-TRKT [KRTt] x
表9.1。 基本矩阵属性摘要。
(iv)F具有七个自由度:3times;3齐次矩阵具有八个独立比率(有九个元素,并且共同缩放不重要); 然而,F也满足约束det F = 0,这消除了一个自由度。
(v)F是一
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[429284],资料为PDF文档或Word文档,PDF文档可免费转换为Word

