英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
一种基于FDC2214的手势识别装置
摘要—一组手势识别设备被设计成
实现简单的手势识别,如“1”-“5”和“石头”、“剪刀”、“布”手势的确定和训练。该系统主要由控制器和人机界面组成。该控制器采用ARM Cortex-M4内核的STM32F407VGT6微控制器作为主控芯片。人机界面主要由FDC2214传感器芯片、OLED显示屏和键盘组成。在两个FDC2214芯片检测到外部电容值后,该装置通过卡尔曼滤波获得了8组稳定数据。每个手势的概率由BP神经网络计算,最后由OLED显示结果。该装置可以通过反馈来训练BP神经网络的权重,并确保不同人手势识别的正确率。该装置具有结构简单、识别精度高、学习和训练的优点。
关键词——FDC 2214,手势识别,卡尔曼滤波,BP神经网络
一.导言
随着计算机的广泛应用,人机交互已经成为人们日常生活的重要组成部分。人机交互的最终目标是实现人与机器之间的自然交流。然而,由于手势的多样性、多义性、时间和空间差异以及人手的不适,手势的识别已经成为一门跨学科的学科。通常在人机交互领域,手势被定义为一组具有特定含义的信息,由手掌和手指手势组合而成,称为手势[ 1 ]。
手势可分为操作手势和交流手势:例如,钢琴伴奏者的手指运动是操作手势。通过十个手指的不同组合,可以在键盘上发出不同的声音来形成音乐播放,这仅仅具有操作的意义,不包含视觉信息。交通警察在路上的手势是交流手势。通过观察交通警察的不同手部动作,司机可以理解警察的含义,其中包含视觉信息[ 2 ]。
文件[ 3 ]将手势识别系统分类为“带有数据手套作为输入设备的手势识别系统”和“带有摄像头作为输入设备的手势识别系统”。与上述两种系统不同,基于TI公司开发的电容传感器FDC2214设计了一种手势识别装置。
电容传感是一种低功耗、低成本和高分辨率的非接触传感技术,适用于从近距离检测和手势识别到远程液位传感的应用。电容传感器系统中的传感器可以使用任何金属或导体,因此它可以实现高度灵活和低成本的系统设计。
采用FDC2214芯片设计制作手势识别装置,该装置使用相对简单、灵活、成本较低,并能保证识别精度。
二.系统方案设计
利用TI公司的传感器芯片FDC2214设计制造了一套手势识别装置。它有两种工作模式:训练和判断。以下是系统方案演示。
答:中央处理器的选择
场景1 :瑞萨R5F100LEA。Renesas R5F100LEA芯片具有代码生成速度快、操作简单的优点,但由于芯片资源少、代码灵活性低,所以没有采用这种方案。
场景2: STM32F407。STM32F407系列芯片具有低功耗、高程序运行效率和高性价比的优点。同时,有足够的片内资源来提供手势识别和人机交互条件。
综合比较上述两个选项,系统使用第二个选项。
手势识别方案的演示
场景1 :采用固定手指识别方法。当做出不同手势时,可以为FDC 2214获得的数据选择适当的阈值,以检测哪个检测区域具有手指,从而识别手势。该方案的设备和算法简单明了。然而,有必要在特定位置做出手势,阈值的选择受到环境的极大干扰,对于不同尺寸的手,所确定的阈值是不同的。
场景2 :使用8块面积相等的检测板,两行排列成一个覆铜板阵列来检测手势。该解决方案使用了更多的检测板,因此可以提取更多的手势特征,并且可以基于八个传感器数据的逻辑组合来判断手势。首先,在计算机侧建立神经网络模型,然后将单片机采集的各种手势数据传输给计算机,并通过计算机训练网络模型,获得神经元之间的权重。然后将计算出的模型移植到MCU,MCU可用于手势识别。这个程序所需的样本数据很大,但它非常准确,用途更广。
综合比较上述两个选项,系统使用第二个选项。
三、系统结构分析
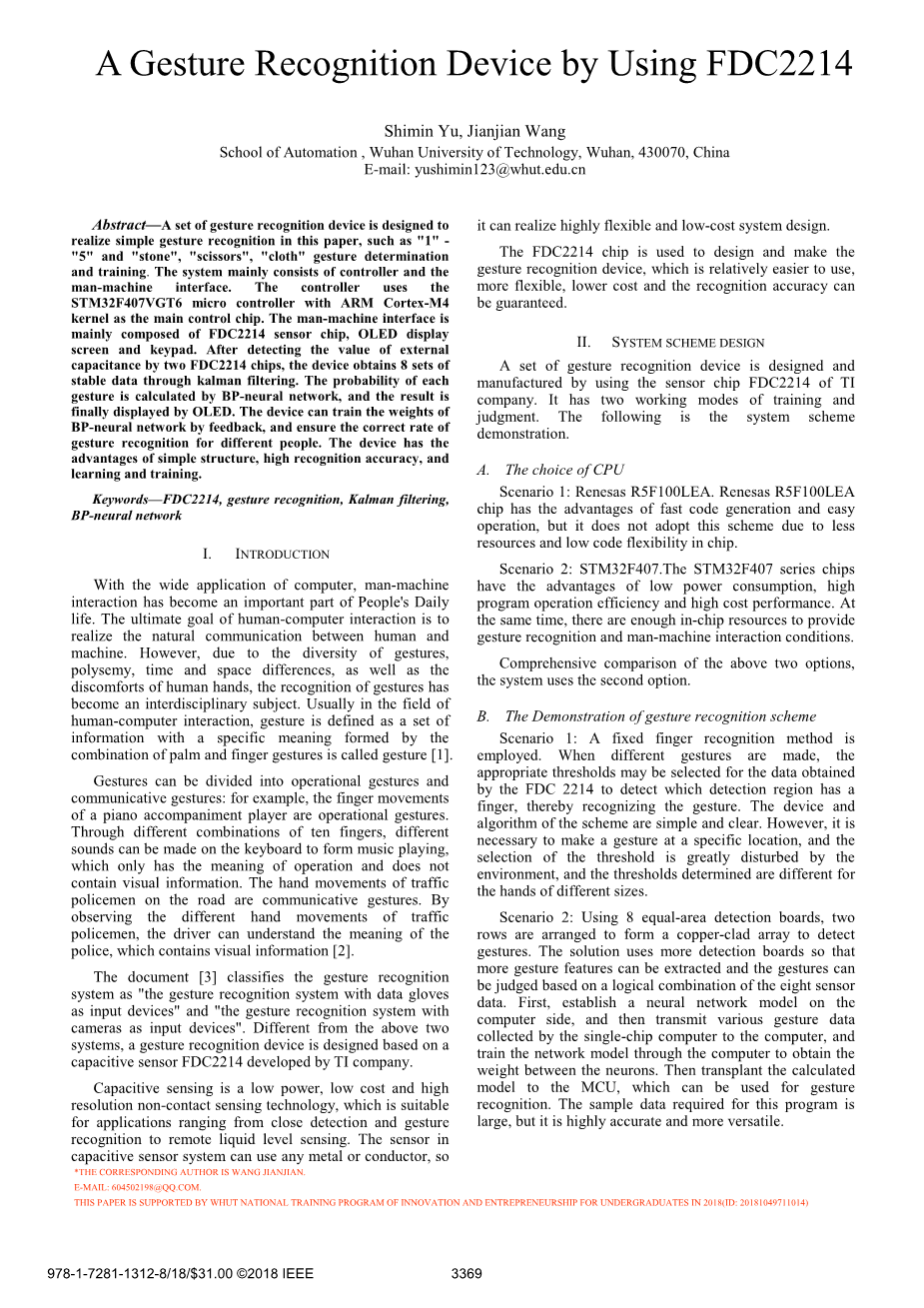
系统论:系统需要处理收集到的信号,然后根据决策做出相应的判断。同时,系统必须具备学习能力和快速计算能力,并能根据不同人员进行相应的参数调整。如图1所示,为了能够识别手势,八块检测板被用来形成铜质阵列来收集手势数据。覆铜阵列完全覆盖了手的位置,以便获得更全面的手势数据[ 4 ]。
信号抗干扰处理: FDC2214信号的通道线被接地线覆盖,测试区域内的铜包板周围被接地线包围,以屏蔽外部环境[ 5 ]的噪声。
数据处理
由于环境的影响,传感器采集的数据波动很大,上下波动可以达到8000,这极大地影响了测量的准确性。因此,使用卡尔曼滤波方法,基于收集的数据和预测值获得最接近实际值的值
[ 6 ]。通过调整协方差计算的权重,数据曲线的平滑度被改变,最终波动被控制在300左右,灵敏度也满足[ 7 ]的要求。FDC2214收集的值是LC振荡产生的频率。根据PCB板设计的L值和C值以及收集的数据,可以找到外部电容器的尺寸:
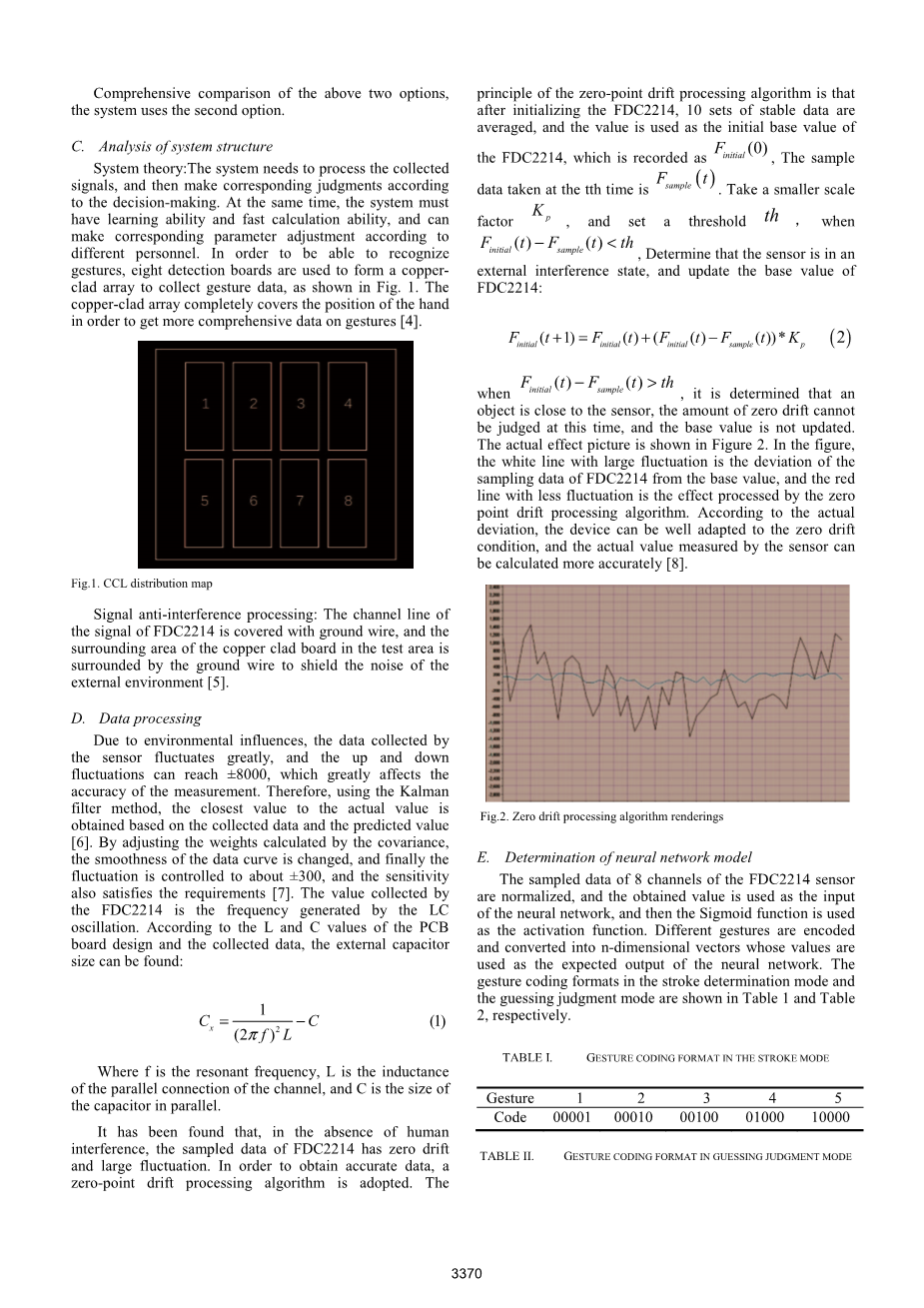
其中f是谐振频率,L是通道并联的电感,C是并联电容器的尺寸。已经发现,在没有人为干扰的情况下,FDC2214的采样数据具有零漂移和大波动。为了获得准确的数据,采用了零点漂移处理算法。零点漂移处理算法的原理是,初始化FDC2214后,对10组稳定数据进行平均,并将该值用作FDC2214的初始基值,记录为。 Tth时间采集的数据是样本t)。取更小的比例参数Kp,并在设置阈值th,当,那么确定传感器位于外部干扰状态,并更新FDC2214的基值:
当时,当物体靠近传感器,此时无法判断零点漂移量,并且基值不会更新。实际效果图如图2所示。在图中,波动较大的白线是FDC2214采样数据与基值的偏差,波动较小的红线是零点漂移处理算法处理的效果。根据实际偏差,该装置可以很好地适应零漂移条件,传感器测量的实际值可以更精确地计算出[ 8 ]。
神经网络模型的确定
FDC2214传感器的8个通道的采样数据被归一化,获得的值被用作神经网络的输入,然后Sigmoid函数被用作激活函数。不同的手势被编码并转换成n维向量,其值被用作神经网络的预期输出。笔画确定模式和猜测判断模式中的手势编码格式分别显示在表1和表2中。
表一 笔画模式下的手势编码格式
|
手势1 |
2 |
3 |
4 |
5 |
|
代码00001 |
00010 |
00100 |
01000 |
10000 |
表二 猜测判断模式下的手势编码格式
|
手势 |
石头 |
剪刀 |
布 |
|
代码 |
001 |
010 |
100 |
在笔画判断模式中,每个手势都有更多的模式特征组合,不同手势之间有一定的相似性,因此采用了双重隐藏层结构。选择8 - 10 - 10 - 5神经网络模型,即8个输入节点,这两层分别具有10个节点和5个输出节点的隐藏层。在猜测模式中,只有剪刀、石头和布料三种手势被区分开来。由于这三个手势之间的区别很大,选择了单个隐藏层结构,根据经验公式:
在公式中,输入节点的数量是隐藏层节点的数量。选择8 - 17 - 3的神经网络模型,即8个输入节点、17个节点的隐藏层和3个输出节点。
图3 .神经网络模型示意图
系统解决方案
综上所述,手势识别设备打算使用STM32F407VGT6作为处理器,通过FDC2214传感器模块检测手势,并将收集的8个数据通过卡尔曼滤波器作为BP神经网络的输入,最后根据神经网络的输出。通过OLED进行判断并显示判断结果。在判断模式下,设备直接将数据通过计算机训练的神经网络获得判断[ 9 ];在训练模式中,设备根据收集的数据稍微调整现有的神经网络,以满足不同手的需要[10]。
三.电路设计
A .系统的总体框图
根据系统方案设计的手势识别设备的整体框图如图4所示。
图4 .手势识别设备系统的整体框图
CPU和驱动子系统框图和电路原理图
CPU子系统框图如图5所示。
FDC传感器子系统框图和电路示意图
FDC2214EVM子系统框图如图6[11]所示。
FDC2214EVM系统的电路图如图7所示。
图7. FDC2214子系统电路
四.设计
软件部分主要实现手势判断结果[12]的显示和训练命令的输入。每个通道的数据由FDC2214获得,数据被处理,处理结果被传输到BP神经网络以计算手势类型并显示[ 13 ]。主程序流程图如图8所示。
图8 .主程序流程图
五、测试
A.测试程序
硬件测试:下载程序后,观察OLED是否能正确显示传感器的每个通道采样的值。[14]
软件模拟测试:通过Python,采样数据通过BP神经网络,看看它是否能得到正确的结果[ 15 ]。
软硬件联合调试:将BP神经网络结构移植到单片机中,观察设备是否能判断和训练手势。
B.测试结果和分析
在判断模式中,多次对参赛者的指定人进行猜测判断,记录的数据显示在表3中。
表三 判断模式下的猜测判断结果
|
数字 |
手势 |
结果 |
时间 |
|
1 |
'石' |
'石' |
0.634 |
|
2 |
“剪刀” |
“剪刀” |
0.774 |
|
3 |
'布' |
'布' |
0.698 |
表四 笔画模式下的判定结果
|
数字 |
手势 |
结果 |
时间 |
|
1 |
'5' |
'5' |
0.664 |
|
2 |
'3' |
'3' |
0.711 |
|
3 |
'2' |
'2' |
0.763 |
在判断模式中,参赛者的指定人被判断几次,记录的数据显示在表4中。
在训练模式中,任何测试人员都要接受几次训练,然后切换到决策模式来做出猜测判断。记录的数据显示在表5中。
表五 在训练模式下猜测手势训练结果
|
模式 |
训练 |
Mora |
||
|
手势训练 |
次数 |
平均训练时间 |
判断结果 |
判断时间 |
|
“石头” |
2 |
0.885 |
“石头” |
0.653 |
|
“剪刀” |
2 |
0.956 |
“剪刀” |
0.772 |
|
“布” |
2 |
0.734 |
“布” |
0.506 |
在训练模式下,任何测试者都要先接受几个手势的训练,然后切换到决定模式进行笔画决定。记录的数据显示在表6中。
表六 训练模式下的训练结果
|
模式 |
训练 |
Mora |
||
|
手势 |
训练次数 |
平均训练时间 |
判断结果 |
判断时间 |
|
“1” |
2 |
0.648 |
lt;
全文共5728字,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[1113] |
|

