
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
斜拉索机械粘滞阻尼器设计
摘要:外部阻尼器已用于多个斜拉桥,以抑制横向缆索振动。但是,简单而准确的阻尼器设计需要同时考虑所有重要的拉索参数。以前的设计是基于将拉索理想化为紧绳。在本文中,含有粘滞阻尼器的拉索的振动控制微分方程首先被转化为包含无量纲拉索参数的复杂特征值问题,然后进行参数研究,涉及对于广泛的无量纲参数的特征值问题的重复解决方案。基于参数研究的结果,阻尼器对第一模式振动频率和第一模式拉索阻尼比的影响以无量纲格式呈现。结果表明,对于大多数斜拉索所涉及的参数范围而言,斜拉索的影响是微不足道的,而拉索弯曲刚度对所得到的索缆阻尼比具有显着的影响。简化的无量纲关系被提出用于计算阻尼器引起的第一模式拉索阻尼比的变化,使用所提出的方程将比例模型拉索的实验室测试结果与估计值进行比较。最后,提出了与其他关系进行比较的示例问题,以及设计用于抑制雨、风等引起拉索振动的机械粘滞阻尼器。
介绍
由于其经济优势和美观的审美特性,斜拉桥在过去的二十年中越来越受欢迎。 作为斜拉桥的主要构件,斜拉索可以说是整个结构中最重要的元素。 斜拉桥中的拉索风的振动是这类桥梁的工程师和业主关心的一个问题。 已有报告指出,当存在雨和风的某种组合时,斜拉索大波幅振动(大约1-2m)的发生已经有报道(Matsumoto et al.1992)。 这个问题已经引起了桥梁工程界的高度关注,并且一直是见过的公众感到非常焦虑的原因。
解决这个问题的有效方法是改善拉索的阻尼特性。外部阻尼器已被用于抑制主要由风激励引起的横向拉索振动,然而,简单而精确的阻尼器设计规定同时考虑所有重要的拉索参数,如拉索下垂和弯曲刚度等。一些研究人员(Kovacs 1982; Yoneda和Maeda 1989; Uno等1991; Pacheco等1993)已经研究了由外部粘滞阻尼器引入的附加拉索阻尼。振动方法和特征值分析被用来推导出与阻尼器尺寸和位置有关的拉索模态阻尼的通用式(Pacheco and Fujino 1989; Pacheco et al.1993)。然而,在他们的调查中,斜拉索被理想化为拉紧弦。这样,影响拉索动态行为的一些参数的综合影响就被忽略了。这些参数中最重要的是下垂延伸性和弯曲刚度参数,这些参数已被证明会影响斜拉索的动力特性(Mehrabi 和Tabatabai 1998; Tabatabai et al. 1998; Tabatabai和 Mehrabi 1998).。
在本文中,拉索振动的控制微分方程首先转化为包含无量纲参数的复杂特征值问题,包括与拉索弯曲刚度,下垂延伸量和粘滞阻尼器相关的问题。该方程的离散化无量纲形式极大地促进了拉索的大量无量纲参数的参数研究。由Tabatabai等人开发的综合拉索数据库(1998)被用来确定本研究中相关参数的范围,只考虑具有恒定阻尼因子的粘滞阻尼器,无量纲复杂特征值问题在选定的参数范围内重复求解。根据这些参数研究的结果,阻尼器对第一模式振动频率的影响和与外部粘滞阻尼器相关的附加第一模式阻尼比以无量纲格式呈现。此外,提出了简化的关系来将第一模式阻尼比与无量纲拉索和阻尼器参数相关联。虽然拉索振动可能包括几种模式,但本文提出的关系只能解决第一种振动模式。使用上面讨论的参数研究也可以开发其他模式的类似关系。但是,预计解决第一模式振动问题不仅会简化设计程序,而且还可能为其他模式提供主要阻尼改进。基于提出的简单关系,提出了设计方程式,用来选择用于抑制斜拉索振动的阻尼器。 Irwin(1997)提出的用于控制风雨引起的振动的最低要求可以在所提出的设计方程中实现。
无量纲公式
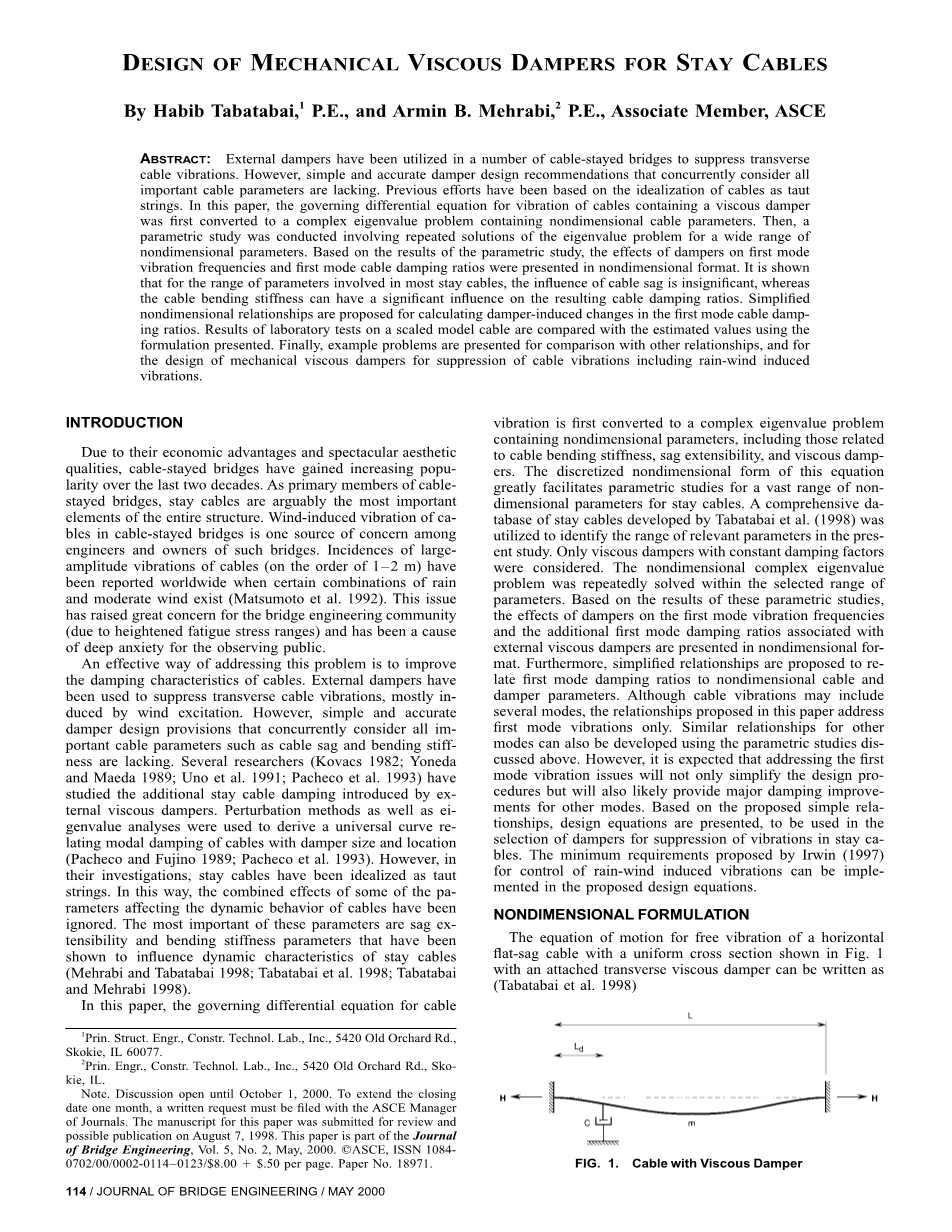
图1所示的带有横向粘滞阻尼器的横截面为均匀横截面,水平自由悬挂拉索的自由振动运动方程可写为(Tabatabai et al.1998)
其中EI =斜拉索的弯曲刚度; H =沿着弦的索力(水平情况下); v =由于振动引起的横向位移; x =沿着斜拉索弦的坐标; h =由于振动而在拉索中产生的附加水平力; c =拉索单位长度的粘滞阻尼器的阻尼系数; m =斜拉索每单位长度的质量。
围绕斜拉索的静载平衡位置的横向运动可以通过分离变量来表示:
(1)
其中w(x)仅为x的函数; q(t)可以表示为
(2)
其中p 为复数,表示为
(3)
其中 =阻尼比; =无阻尼振动的固有角频率; =阻尼振动的角频率。
因此,通过时间t来区分q,其中L =拉索弦长; 并且=凹陷可扩展性参数。 对于水平拉索,此参数表示为
(4)
其中EA =拉索的轴向刚度,并且
(5)
式(5)可以用以下形式来离散化表示
(6)
其中N =沿拉索离散元素的数量; w =模态矢量; I =单位矩阵; B =完整单位矩
阵(对于所有k和l,Bkl = 1); ;w=无量纲复参数(称为频率比),其中p定义在方程(3),是等同于拉索的拉紧弦的第一模式频率,下标j表示考虑频率的模式数。 矩阵x被定义为
由振动引起的附加张力h可以表示为h =h = hlsquo;q(Tabatabai et al.1998),其中
因此,在不考虑q之后,运动方程[(1)]可以简化为特征值问题的形式
对于弯曲拉索,即使拉索弯曲刚度不为零,拉索的静态轮廓也可以近似为抛物线(Tabatabai et al。1998)。 如Tabatabai等人所述,可以基于拉索的振动轮廓和下垂伸长参数来计算由于振动引起的额外张力的幅度hrsquo;(1998)。 那么,上面的等式为
其中=无量纲弯曲刚度参数();n =离散拉索中的内部节点的数量(n=N-1); 或5,分别代表拉索的固定或固定终端状态。是一个n * n矩阵,其中只有对应于包含附加阻尼器的节点的对角分量不为零。 例如,在第二个内部节点位置安装阻尼器的拉索中,可以写成以下内容:
其中所连接阻尼器的无量纲阻尼参数; a =拉索弦上一个离散元素的长度; c =沿着离散拉索连接到某个节点的阻尼器的阻尼系数。 无量纲阻尼参数与Pacheco等人以前使用的无量纲参数成比例(通过因子p,1993)。 矩阵是对角的,因为阻尼器从外部连接到拉索,并且只为拉索定义平移自由度。
(6)的特征值问题可以用以下形式表达
这一系列方程可以修改为特征值解(Crandall和McCalley,1996)
其中
(9)的特征值问题可以通过使用能够处理复特征值问题的商用特征值求解器来解决。 因此,可以找到拉索的特征值(),阻尼比,自然无阻尼频率和阻尼频率。
参数研究
为了评估阻尼器对振动频率的影响,并研究外部阻尼器在提高总体拉索阻尼比方面的有效性,我们使用开发的无量纲公式进行参数研究。 在参数研究中,假设拉索末端固定不旋转,外部阻尼器的位置在拉索一端长度的2%,4%和6%处。 阻尼器的这些位置可以由位置参数表示,,其中是阻尼器连接位置到拉索末端的距离。因此,对应于位于拉索长度的一端的阻尼器的位置。 每条拉索只考虑一个阻尼器。 在每个阻尼器位置,使用介于0和60之间的值进行不同的分析。使用特征值解决方案程序EISPACK(“EISPACK”,1977)进行这些分析。 每个特征值分析的结果包括一个复数,如(3)所述。 这个复数的虚部用来导出阻尼角频率,而实数部分则用来计算无阻尼角频率和阻尼比。
阻尼参数的实际范围
Tabatabai等人 (1998)编制了来自16座斜拉桥的1,400多根斜拉索的数据库。斜拉索数据库中的下垂可扩展性参数()的范围在0到2.84之间。 类似地,几乎所有的弯曲刚度参数()都在10-600的范围内。 对于无量纲阻尼参数,范围取决于阻尼因子c以及的范围。根据斜拉索数据库,值在3和43kN·s / m之间,平均值为21kN·s / m。 假设阻尼系数c的范围为0到200 kN·s / m,则的最大范围将近似为0 lt; lt;200/3。 因此,对于无量纲阻尼参数,假定0到60的范围。
对拉索阻尼的影响
计算第一模式阻尼比(,以百分比表示),并绘制前面讨论的和参数的范围。 Tabatabai等人发现了一套完整的图表(1998)。 图2显示了对于,获得的这些图中的一个。这些分析中忽略了拉索的固有阻尼。 因此,整个计算的阻尼比直接归因于阻尼器。
这些分析表明,在lt;1的范围内,机械阻尼器的效果对下垂伸长参数()不是很敏感。该范围覆盖了斜拉索数据库中超过95%的拉索。对于大于1的值,阻尼比(百分比)随着的增加而略微减小。对于大于100的弯曲刚度参数(),这种减小是最明显的。因此,对于小于1的,可以假设归因于阻尼器的阻尼比独立于下垂伸长参数。如前所述,拉索倾斜对振动的影响仅通过 引入。因此,归因于阻尼器的阻尼比也可以被认为与拉索倾斜无关。
通常,阻尼比随无量纲阻尼参数()的增加而增加到最佳水平。达到最佳效率后,阻尼参数的进一步增加会导致拉索阻尼比的降低。 这是因为,对于较高的阻尼参数,阻尼器更多地用作刚性支撑。这迫使第一振动模式(即,阻尼器位置处的节点)的形状发生变化。因此,第一种振动模式的频率将会增加。这个频率大约等于在减震器位置由支架“缩短”的拉索的频率。
不同位置的阻尼器的最佳无量纲阻尼参数()不同。 为了研究阻尼器的效率以及阻尼参数与阻尼比之间的关系,针对不同位置的阻尼器绘制无量纲分析的结果,其中为0.01,对于小于1的值,假设阻尼比与无关。
图3,4和5分别显示了从一端到2%,4%和6%拉索长度位置的阻尼器的曲线图。为了清楚起见,这些图中仅出示了一部分计算数据。对于位于2%()的阻尼器,最佳阻尼参数()为20.可以在图3中注意到,当弯曲刚度参数()小于约100时, 比最佳阻尼参数的阻尼比更高。 然而,由于数据库中的绝大多数拉索(超过82%)具有大于100的参数,所以在这种情况下的最佳值仍然被认为是大约20. 通过直接参考所呈现的关系曲线来为每个特定情况降低值,可以更精确地选择最优。 对于0.04和0.06的,最佳阻尼参数分别为8和6。
图3.不同弯曲刚度参数的阻尼比,阻尼器= 0.02, = 0.01
图4.不同弯曲刚度参数的阻尼比,阻尼器= 0.04, = 0.01
图5.不同弯曲刚度参数的阻尼比,阻尼器= 0.06, = 0.01
对于小于或等于的阻尼参数,第一模式拉索阻尼比与弯曲刚度参数之间的关系可以通过以下等式近似
其中a,b,d和e对应表1中的为0.02,0.04和0.06。 方程(10)是基于一系列回归分析得出的,最小回归系数为0.96。 对于0lt;lt;2,可以在两者之
间使用线性插值,用(10)计算,时。
可以注意到在图3,4和5中,对应于较高值处的最佳阻尼参数的曲线渐近于水平线。在值较高(相对较小的弯曲刚度,例如gt; 200)时,当拉索下垂的影响被忽略时,拉索的作用类似于拉紧弦。对于紧绷的拉紧弦,Kovacs(1982)指出导致最大可能阻尼(第一模式)的的最佳值约为。根据这一说法,=0.02,0.04和0.06的值分别为25,12.5和8。这些值分别高于本研究中=0.02,0.04和0.6时获得的20,8和6的值。图3,4和5证明了Kovacs(1982)提出的值的效率低于最优值,特别是对于较高的值。应该指出的是,阻尼比对在最佳值处及其附近的变化较不敏感。 Kovacs(1982)也得出结论,任何模式下可达到的最大可能阻尼比约为0.5,这表明=0.02,0.04和0.06时,最大阻尼比分别为1%,2%和3%。
这种关系是一个简单但准确的经验法则。 计算出的最大可能阻尼比(图3,4和5)与Kovacs(1982)报道的阻尼比之间有很好的一致性。 但是,如果拉索弯曲刚度参数较小,则最大可达到的阻尼比,特别是对于靠近拉索端的阻尼器,可能远远低于用于拉紧弦的报告。
为每个I选择的最佳无量纲阻尼参数是基于在相对较高(例如, gt; 150)间使用线性插值,用(10)计算,时。
对振动频率的影响
除了引入阻尼效应之外,机械阻尼器还会改变拉索的振动频率。 频率的变化有两种方式。 首先,通过在系统中引入阻尼,基于以下关系将自由振动频率降低到阻尼振动频率:
其中 =阻尼角频率; =无阻尼固有角频率; =归因于外部阻尼器的总阻尼比( = 0.01)。 对于本研究中考虑的情况( = 0.02,0.04和0.06),最大可能的阻尼比约为0.03。 对于这个阻尼值,振动频率的降低量小于0.05%。
阻尼器的存在还通过限制连接点处的拉索来改变振动频率。为了研究外部粘滞阻尼器与振动频率变化之间的关系,使用新的无量纲公式计算带有阻尼器的拉索在不同位置的各种阻尼参数的频率比。对于所讨论的拉索参数范围的每个阻尼器位置绘制结果。 Tabatabai等人发现了一整套这些图表(1998)。图6显示了 =0.04和 = 8情况下的曲线之一。频率比()是第一模式拉索频率有阻尼器()与无阻尼器()的同一拉索的频率之比。对于0 lt; lt;1.0,频率比率实际上不依赖于,对于1到3之间的,频率比的变化仍然可以忽略不计,主要参数是弯曲刚度参数。在图7,8和9中分别绘出了代表频率比分别对于 = 0.02,0.04和0.06对应的(在= 0.01)的曲线。这些曲线表明,一般来说,频率比随着的增加而增加到一定水平,然后曲线变为平稳。当只考虑与相对应的曲线时,频率比率趋向于在150-200的处。当值小于2
全文共13122字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14350],资料为PDF文档或Word文档,PDF文档可免费转换为Word

