
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
ChARMin:一种适用于儿童上肢康复的机器人
摘要:
对手臂进行强化性康复训练可以促进神经受损患者的运动恢复。如今可驱动机器人凭借其主动性辅助能力,被越来越多地应用在康复治疗领域,用于提高与评估患者的神经康复治疗。但目前为止,还未出现针对儿童上肢末端运动康复问题而进行具体设计的可驱动机器人。本文将介绍一种新型的基于机械外骨骼的手臂机器人ChARMin,它具有四个自由度用于引导辅助青少年运动障碍患者的肩部及肘部运动。其机械结构设计应用了基于并联运动学的远程旋转驱动中心,这种设计使得患者与机器人间保持安全距离的同时降低了运动副摩擦,能够同时覆盖5至18岁患者的不同上肢结构尺寸需求,具有很强的适应性。除此之外,本机器人结合了一种新型被动式重力补偿机构和6自由度力传感器,实现安全性与设备的机构透明性。
1.背景介绍
大多数曾患诸如中风等神经性疾病的人群,往往伴随有上肢运动障碍症状,这使患者独立生活尤为艰难。部分患者通过接受以恢复某些特定功能为目的的上肢康复治疗,缓解甚至解决了,这类运动障碍的问题。从以往的研究来看,强化训练可以触发神经的可塑性,对运动康复尤为重要。
先天性或获得性大脑受损的儿童通常也患有上肢障碍,严重影响了他们的日常生活。在西北欧最为普遍的一种多发于儿童的神经疾病为脑瘫,其发病率高达千分之2.5。脑瘫是一类影响身体运动和肌肉协调的慢性疾病的总称。目前儿童的运动康复的根本原理并没有完全确定,但是初步的研究成果表明儿童的运动康复与健康受试者在运动学习特性上是相同的。除此之外,研究也表明儿童大脑的神经可塑性更强,相比成年人,他们的大脑损伤恢复能力更佳。可以肯定的是,与成年人相同,强化治疗和主动参与性治疗对于偏瘫儿童的康复十分重要。
1.1儿童康复机器人
在过去的二十年,机器人因其能提供强化、重复、高频率的训练以及协助、评估康复效果,越来越广泛的被运用在成年人康复治疗的领域。此外,虚拟现实场景也可以被应用在激励患者主动参与康复,实现患者治疗效果的实时增强反馈。更为重要的是,通过实践证明,康复机器人对成年中风患者的康复治疗提供了积极效果。
与成年人使用的机器人辅助康复治疗形成鲜明对比,目前很少有关于儿童康复治疗的研究以及相关的上肢辅助康复的主动式机器人。最早用于幼儿群体的可驱动机器人都是以成年人为对象的设计,例如 InMotion2 和 NJIT_RAVR 系统。这些基础性调查研究表明,儿童可以通过配合可驱动机器人促进其康复治疗。在本文中,我们介绍了一种新型设计的可驱动机器人,它适用于运动功能受损的儿童(例如患有脑瘫的儿童患者),以促进小儿康复治疗方面的研究。该机器人设计研究的重点,在于设计一种正确的机器人系统既能够满足临床治疗所需要的目标,又能够保证其物理约束的安全性、典型患者的要求以及小儿目标群体的特性。
1.2 ChARMin 对于儿童的康复训练
ARMin是一种针对成年中风患者神经康复的手臂外骨骼机器人。在苏黎世联邦理工学院的Sensory-Motor System实验室中,不同版本的ARMin机器人正在被陆续开发。来自ARMin机器人的研究只能被部分地运用在小儿患者的版本ChARMin(Children ARMin)。这类年龄很小并且较为特殊的目标群体具有其特殊的需求,这使得针对其设计的机器人在技术方法和解决方案上的难度大为提高。
将ARMin机器人缩小尺寸进行设计是不可行的,因为儿童并不是一个“小大人”。成年人的关节扭矩要远远高于儿童,就算是按儿童身体质量比例时设计,也不能满足要求。因此,只是简单地根据成年人的身体结构比例推断至儿童是不合适的。另一个问题在于机器人面对的目标群体需要覆盖5岁至18岁的儿童。对于18岁患者传递恰当的扭矩使完全瘫痪的上肢安全地随动的设计,对于5岁的儿童可能带来安全性的风险。
显而易见,小儿患者目标群体具有特殊的机器人设计需求,因此针对该机器人的设计应该是从成年患者ARMin机器人向小儿患者设计的转化。
2.ChARMin机器人的设计要求
2.1长度适应
患有早期显化疾病,例如脑瘫的儿童通常呈现出生长迟缓,这使得机器人的结构设计需要依据特定群体的人体测量数据进行。由于患有脑瘫儿童手臂部分的相关人体测量学数据并不充分,我们推导得到健康儿童的身高相当于某一年龄段的脑瘫儿童身高数据。例如,50%的5岁脑瘫儿童的身高相当于大约50%的3岁儿童身高。因此,3岁至18岁的健康儿童的人体测量数据被作为ChARMin机械结构设计的尺寸依据。
2.2力约束
机器人输出力矩应足以引导一个瘫痪者手臂运动并抵消一个痉挛状态的手臂的运动,并且避免可能对患者身体产生的撞击。除此之外,机器人应该足以运用在相对健壮的患者使用机器人作为评估工具确定等距力的情形。综上所述,应该以健康受试者的数据估计机器人需要应用于关节处的力矩大小(见表1)。水平方向肩部的外展和内伸的数据难以寻找,因此基于ARMin的研究数据(60Nm),我们暂时选择40Nm作为ChARMin在关节处应该施加的力矩。
2.3活动范围
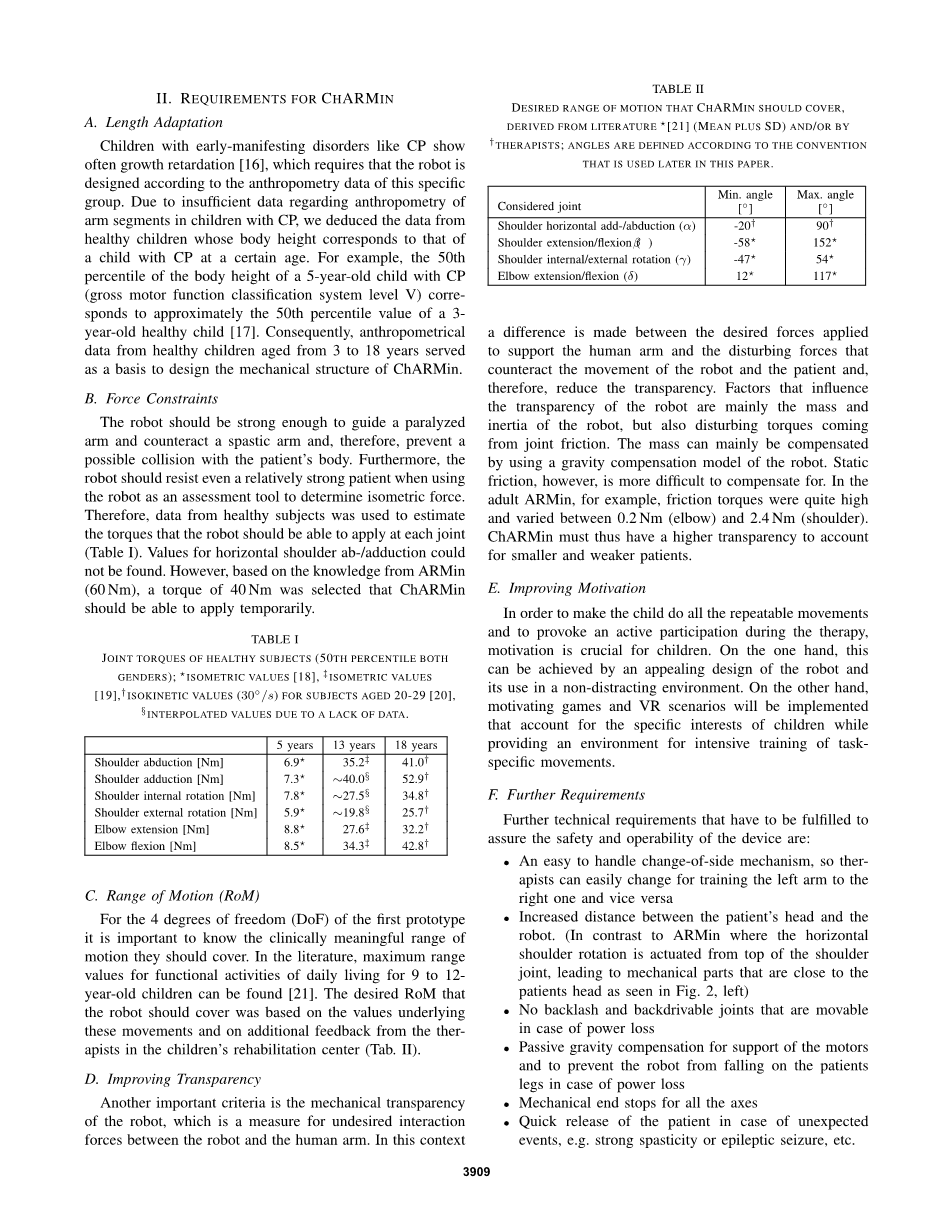
对于一个具有四自由度的原型机,确定肩部在临床意义上的正确运动范围是十分重要的,根据文献记载,可以查找到9岁至12岁的儿童在日常功能活动中的最大范围数值。机器人应该具备的期望活动范围,应结合运动本身的基础数据和来自儿童康复中心的治疗师的反馈意见。
2.4提高透明度transparency
另一个重点是机器人结构的透明度,透明度是机器人和人体手臂之间不期望存在的相互作用力的程度描述。在本文所述的情况下中,施加的用与支撑手臂的期望力与抵消机器人与患者运动时产生的干扰力间存在偏差,因此,降低透明度是必要的。影响机器人透明度的因素主要是机器人的质量和惯量以及来自于关节摩擦的干扰力矩。质量项可以通过机器人的重力补偿模型进行补偿,但是静摩擦力相对来说较难以补偿。在ARMin机器人设计中,以摩擦力矩为例,其力矩要大很多并且在0.2Nm(肘关节处)到2.4Nm(肩关节)间变化。因此ChARMin对于年龄较小和身体较弱的患者群体必须具有较高的透明度。
2.5提高积极性
为了使儿童完成所有重复的运动并激发其在治疗过程中的主动参与性,积极性对于儿童十分重要。一方面,这个问题可以通过具有吸引性的外观设计以及专注性应用环境等方面着手;另一方面,也可以从儿童兴趣方面考虑运用激励性游戏以及VR场景,提供一个特定动作强化训练的环境。
2.6其他要求
其他的需要满足以确保安全性和设备操作性的技术要求如下:
(1)机构能易于实现左右手两侧互换,治疗专家可以较为容易的设计左右手的交替训练;
(2)增加患者头部到机器人本体间的安全间距;
(3)断电状态下无机械间隙和反向可驱的可移动关节;
(4)用于支持电机的被动重力补偿以及断电状态下防止机器人掉落至患者的腿部;
(5)所有运动坐标轴具有机械限位止动;
(6)在某些预料外的事件发生时,患者能够快速脱离装置,例如强痉挛或癫痫发作等等。
除了所有的技术要求,同样需要更多的电气和软件要求以确保患者的安全,例如关节扭矩和运动范围的约束,控制器的监控(速度控制、力控制、可行性确认),所有关节处安装的冗余传感器或手持安全开关。
3.方法
3.1外骨骼与末端执行器对比
通常,外骨骼设备和末端执行器设备是不同的。基于执行器的机器人将患者的手或前臂连接至执行器的某一点,作为对比,基于外骨骼设备的结构类似于人类手臂解剖结构,同时其旋转轴一般对应于人体手臂。在本文中我们采用外骨骼结构机器人,原因如下:
(1)每个手臂关节都可以进行独立控制,这使得我们可以完全定义手臂的位置,通过完全定义使生理学运动训练不依赖于补偿或者协同模式;
(2)设备可以提供更广泛的运动范围,因而允许功能性运动的训练;
(3)关节扭矩可以被独立测定;
(4)单关节可以被支持或阻挡;
(5)每个关节具有机械结构限制,防止过度弯曲/伸展等可能对关节产生的潜在伤害。
3.2总体设计
我们对机器人进行了模块化设计,使得远端部分可以进行适应性替换以对应不同需求范围。通过将患者划分为5岁至13岁、13岁及以上两类,以覆盖整个目标群体,远端模块针对不同患者进行具体化设计。第一代ChARMin原型机将拥有四个自由度,其中为肩部提供三个自由度,为肘部提供一个自由度,它将配备为5岁至13岁儿童患者设计的远端模块。在下面的小节中,机器人的结构将通过单个关节形式进行阐述。
3.3肩部水平外伸与内收
机器人驱动的第一个坐标轴为肩部水平方向的外伸与内收。由于需要将驱动装置远离患者的头部,因此设计了一种新的并联运动学机构。图2中将此结构与ARMin系列的结构进行对照。
图3中描述了一个简化的远端旋转中心(RCoR)运动学模型。RCoR通过(Mot1)从远处的旋转中心驱动机器人,并将旋转传递至肩关节。这一结构设计类似于US Patent 2008/0304935,但是本设计减少了铰点的数量并改变了手臂固定方式,通过偏移角度theta;,将机器人的运动范围向接近于患者的功能性运动范围进行优化设计。
3.4 肩部弯曲和伸展
第二个坐标轴由mot2驱动肩部的弯曲和伸展动作。坐标轴设置于并联结构的末端,为了使机器人旋转轴对齐人类生理学坐标轴,必须考虑到上臂肩关节的竖直位移,因此在肩关节和Mot2轴间引入偏移量Delta;d,使得肩关节的竖直位移取决于肩部弯曲/伸展角beta;和弓形构件(seg1)。
3.5 肩部向内/向外旋转
成年人用ARMin机器人在内旋和外旋方面有很多问题,比如弧形导轨与传送带间产生的较大摩擦力、为防止碰撞而设置了过大的安全距离。
由于很难在上臂旋转轴线附近设置驱动器,故引入了一个平行RCoR机构,较ARMin系列产生更小的摩擦力,并使得手臂接近患者的身体的同时不会在要求范围内发生碰撞。这一并联结构最初由 Stienen et al. 2009 引入,允许围绕其纵轴旋转上臂。
3.6 肘部关节及前臂
ChARMin的第四个可驱动关节是肘部,驱动装置通过垂直布置使肘部关节进行运动(图1)。更多的远端模块没有在一代原型机中进行设计。在此处我们提供了一个长度可调的扶手,前臂有一个铐口以及一个可抓持的棍子
3.7 机器人重力补偿
为了防止机器人在断电状态下坠落并支持mot2轴的电机,在该轴处设置有一个被动式重力补偿结构。为了实现补偿效果,将弹簧E安装至偏移mot2旋转轴距离ds处,通过一段由小滑轮导向的绳索与弹簧连接。弹簧连接至点A从而产生一个作用于mot2轴的力矩,所需的拉伸弹簧被集成在上述的并联结构中(在图3中以波浪线标注)。但弹簧连接必须穿过轴线H以到达补偿箱(图3),这将在并联结构上产生一个不希望存在的力矩,除非绳索和旋转轴线在它们相互通过的位置共线。
对于补偿机械臂重力所需要的力矩取决于角度beta;,例如当beta;为0°或180°时,不需要进行重力补偿;而当beta;为90°时且机械臂水平时,所需力矩为最大值。这一性质使机械臂期望的被动补偿Compdes,rob呈现为正弦曲线(图6),而应用该补偿机构的补偿曲线为Compact,rob与正弦曲线有些许偏差,考虑到不同手臂的重量和由机器人机构长度设定而产生的不同力矩,弹簧的预紧力需要按需求改变。在此处,弹簧机构能够产生最大为24Nm的力矩同时补偿曲线依然接近于正弦形状。
3.8 换边机构
机器人需要适用于双臂,因此设计了换边机构。为了进行左右换边配置,整个外骨骼机器人需要绕水平轴a1进行旋转(图3)并调整角度theta;。机器人像这样进行姿态改变将会使得被动重力补偿在错误的方向作用一个偏移力矩,因此,重力补偿机构需要进行改变以反
全文共6428字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16937],资料为PDF文档或Word文档,PDF文档可免费转换为Word

