英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于扰动补偿采用非线性预测的二自由度车辆横向控制
IFAC-PapersOnLine 49-11 (2016) 182–189
Stefan Hahn Klaus Zindler Ulrich Jumar
摘要:回避行人保护系统是道路使用者通过自主回避来避免即将发生的碰撞。为了达到这个目的,在本文中提出了一个新的横向控制方案。我们提出了一个由线性PDI控制器和基于扰动补偿的非线性模型组成的两自由度结构。通过后者对回避轨迹曲率(扰动变量)的高度非线性影响来对横向偏差(被控变量)进行修正补偿。相比之下,经典的非线性控制方法所提出的方案不需要完全状态向量的测量。
关键词: 自动驾驶,防止碰撞,两自由度控制,非线性模型扰动补偿,车辆横向引导
1前言
1.1问题和要求
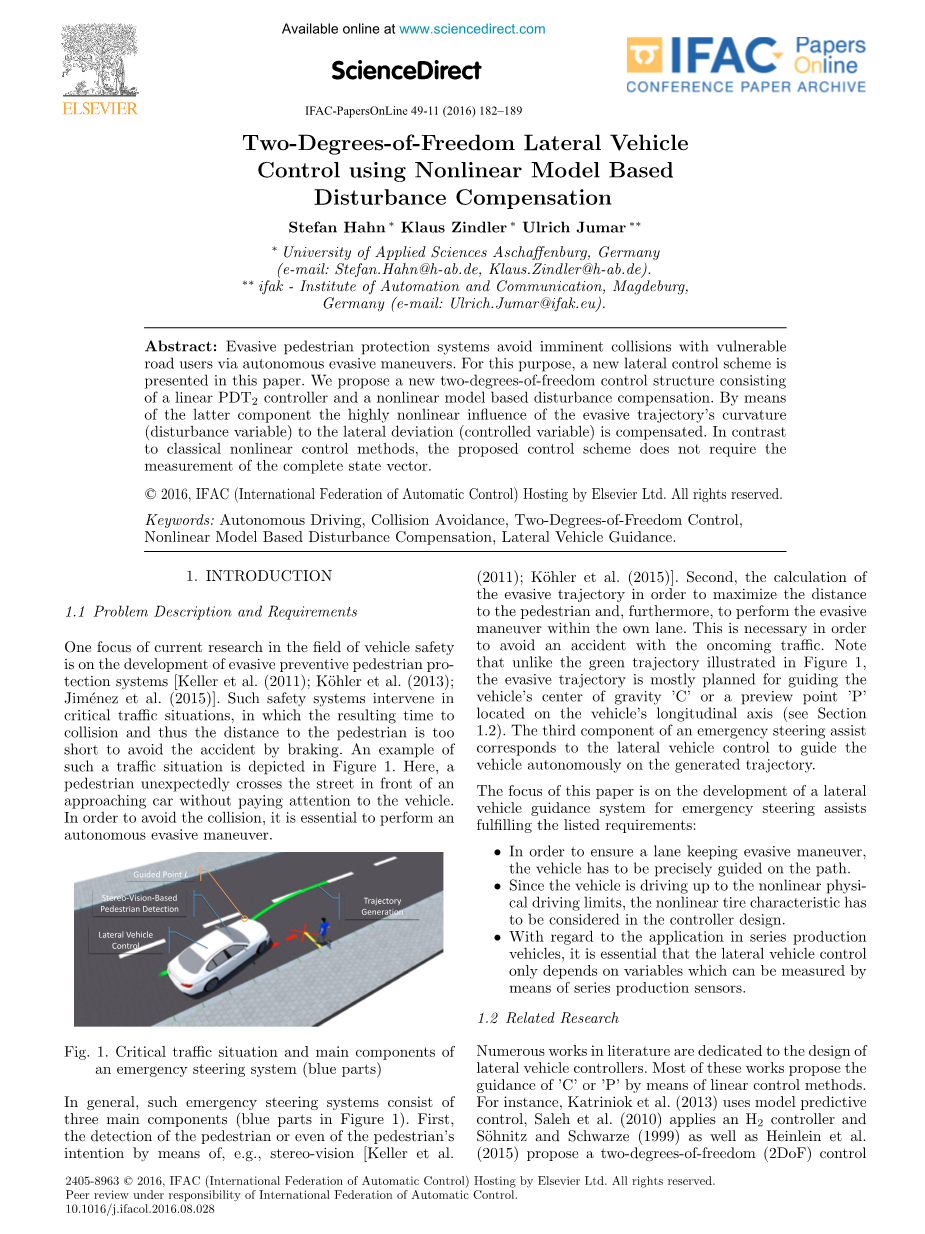
当前汽车安全领域的一个研究重点是回避预防行人保护系统的发展(Keller et al. (2011); Kuml;ohler et al. (2013)Jimacute;enez et al. (2015))。这样的安全系统将介入当前产生的碰撞时间和距离太短而不能通过刹车来避免意外的严重交通现状。这样的交通现状如图1所示:一个行人意外的穿过一辆驶来的车前面的街道而他没有注意到驶来的车辆。为了避免这种碰撞,车辆必须执行一个自主回避动作。
图1 关键交通情况及主要组成部分紧急转向系统(蓝色部分)
一般来说,这种紧急转向系统由三个主要部件组成(图1中的蓝色部分)。第一,通过立体视觉等手段检测行人或行人的意图[Keller et al.(2011); Kuml;ohler et al. (2015)]。第二,计算回避的轨迹,以最大限度地距离远离行人,而且,在行驶车道内执行回避。为了避免即将到来的意外这是必须的。注意与图1所示的绿色轨迹不同,逃避轨迹主要是指车辆的重心“C”或预览点“P”位于车辆的纵轴上(参见章节1.2)。紧急转向辅助的第三个组成部分对应于横向车辆控制来引导车辆自主生成轨迹。
本文的重点是研究满足上述要求的用于紧急转向辅助的车辆横向导向系统的发展。
为了保证车道的回避机动,车辆必须在道路上精确地引导。
由于车辆行驶到非线性物理驾驶极限,所以在控制器设计中必须考虑非线性轮胎特性。
关于串联生产的应用车辆,侧向车辆控制至关重要只取决于可以测量的系列变量传感器的手段。
1.2相关研究
现在的文献中的许多作品都致力于设计侧向车辆控制器。 这些作品中的大多数提出了通过线性控制方法指导C或P。例如,Katriniok et al。 (2013)使用模型预测控制,Saleh等 (2010)适用H2控制器,Shnnitz和Schwarze(1999)以及Heinlein et al(2015)提出两自由度(2DoF)控制结构。该结构包括与H2控制器(Shnhnitzand Schwarze(1999))组合的线性干扰补偿,以及一个PDT控制器[Heinlein et al。 (2015)]。两种干扰补偿都是基于倒置模型,因此受到限制。由于用于控制器设计的线性模型,所提到的控制器都不考虑所需的非线性轮胎特性。因此,实现了仅在物理驾驶极限下的有效控制性能。
为了即使在高度的机动路径下能精确的指导C或P,控制方案不得不考虑非线性轮胎特性。对此,Kuml;onig(2007)通过输入输出线性化的特点提出了一种侧向车辆控制,Falcone et al(2007)通过非线性模型预测控制和Saedodin (2010)通过可变结构控制。然而,这些控制器在串联生产车辆中的预期应用的观点中具有主要的缺点:非线性控制方法。非线性控制方法需要测量所有状态变量,这些变量不能完全由传感器提供。
除了在预定义的路径上引导“C”或“P”,Hahn等人(2015)提出了一种新的横向控制方案:在车辆的左前角“L”(图1中的橙色部分)上一个回避轨迹(图1中的绿线)在道路的中心线结束。基于第六种新模式也考虑非线性轮胎特性的顺序以及作为“L”的高度非线性动力学和运动学,应用输入输出线性化的方法实现了车辆的精确轨道引导。这种方法的主要优点是可用空间在自己的车道内的回避机动被最佳利用。然而,这也与测量完整状态向量的要求有关。
另一种方法是使用非线性观测器来估计车辆不能通过传感器测量的动力学状态变量。然而,由于计算的复杂性,和给出了证明闭环系统稳定性的问题违反分离定理的结果,非线性控制回路[Adamy(2014)]这种方法是没有被进一步考虑。
1.3提出的解决方案和主要贡献
如第1.2节所示,众所周知的非线性控方法需要测量信息完整的状态向量,这是不利于车辆的紧急转向系统的预期应用。相反,通过使用基于线性化模型的线性输出反馈控制,关键的非线性会被忽略。 因此,必须制定新的控制方案,以满足第1.1节所列的要求。
我们提出了一种新的2DoF控制结构,其包括通过基于非线性模型的干扰补偿扩展的线性输出反馈控制器,其被设计为参考Roppenecker(1990)中提出的基于线性模型的前馈控制。这个主要思想是为了实现自动控制回路内部的扰动补偿。即,补偿器内部的非线性模型是通过非线性控制方法进行控制。因此,根据模型的计算状态确定补偿器的控制信号,而不是在测量的。为了让模型内部关于目前的工作点参数化,只有通过测量车辆的速度和曲率的回避轨迹。在侧向车辆引导的情况下,曲率通常是被假定为干扰变量 [Souml;hnitz and Schwarze(1999); Saleh et al. (2010); Katriniok et al. (2013); Heinleinet al. (2015); Hahn et al. (2015)]。
由于车辆回避机动的执行,我们也提出左前方的指导角“L”,以利用自由空间使自己的车道最佳[Hahn et al.(2015)]。因此,干扰补偿中的模型不仅包括非线性轮胎的特点,也与“L”的非线性动力学和运动学密切相关。
在下一节中,详细介绍了所提出的2DoF控制结构。 然后,在第3节中导出并分析了包含“L”的动力学和运动学的装置模型。基于该模型,设计了线性输出反馈控制器以及非线性扰动补偿(第4节)。
此外,第5节包含了提出了原型车及其控制结构的实施以及通过有行人参与的交通情景安全评估对试验场进行验证,如图1所示。此外,将控制概念的性能与Hahn(2015)等人中提出的非线性状态控制器的性能以及Heinlein(2015)等人提出的线性2DoF控制方案的性能进行了比较。
本文以对未来的总结和展望研究目标作为文章结尾(第6节)
2二自由度控制结构体
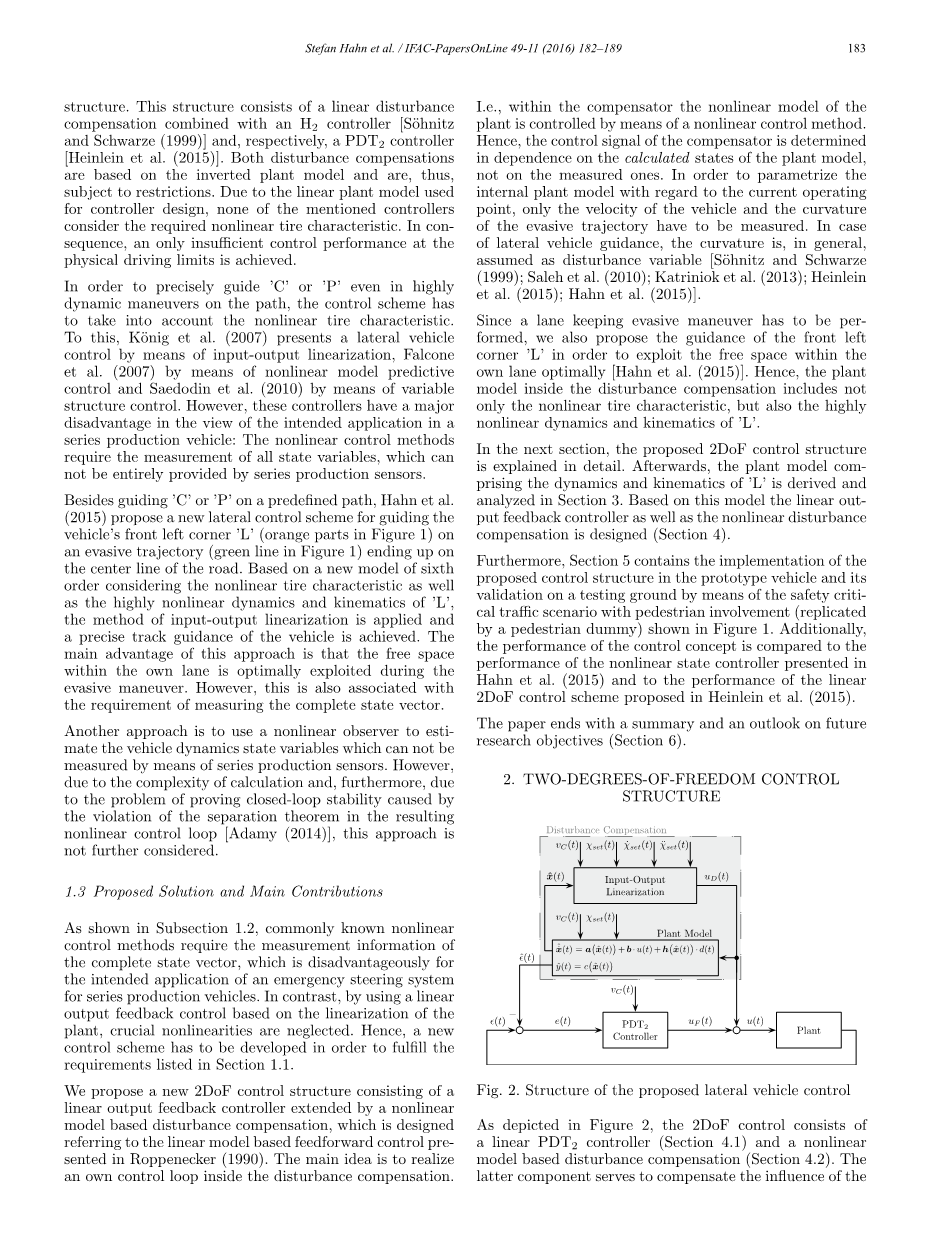
图2车辆侧向控制结构
如图所示,2DoF控制包括线性PDT 2控制器(第4.1节)和基于干扰补偿的非线性模型(第4.2节)。基于干扰补偿的非线性模型用于补偿回射轨迹的曲线集对侧面的影响偏差。
在补偿器内部,实现了一个自己的控制回路:这里,非线性模型由输入输出线性化的手段控制。这种模型由“L”的非线性动力学和运动学构成,包括非线性轮胎特性以及转向执行器的动态特性。控制该模型的输入以及输入对应到转向执行器的设定值时,位数变量到,输出变为。如前所述,内部模型是参数化的关于当前的运行点是取决于当前速度和。
干扰补偿的控制信号根据状态变量来计算: ,,,此外,(t)以及(见第5.1节进行分析计算)。不仅用于控制模型补偿,也是控制真正的模型本身。因此,被加到线性反馈控制的控制信号上。
此外,计算出的横向偏差应从从测量偏差中减去。可以看出在模型之间确切相符并且等于0的情况下,PDT 2控制器不会干预。因此,线性控制器只需要补偿由模型不确定性引起横向偏差。
PDT 2控制器是基于线性化设备模型设计的,并适应于当前车速。这是必要的,因为横向驾驶行为强烈依赖于。
注意输出反馈控制器的设定值被指定为零,表示车辆跟随具有零横向偏差的轨迹。因此,比较之后设定值与实际值之间的差异可以忽略。
3模型建立
本节简要介绍了设计所提出的扰动补偿所需设备的数学模型以及输出反馈控制器。 有关模型的详细推导,请参考Hahn et al。 (2015)。
根据模型本节分为三个部分:第一、“L”的动力学,第二、“L”的运动学,第三、动力行为的转向执行器。最后,一个六阶非线性状态空间模型具有状态变量:侧滑角,偏航率,行程角度偏差,横向偏差,方向盘角速度和方向盘得到角度(相应的状态差方程式)。
3.1L的动力学
在本小节中,“L”的运动方程,即微分方程:将被导出。如图3所示:根据ISO 88551.3 / DIN 70000[Heiszlig;ingand Ersoy(2011)]杠杆臂和指定相对于自身固定的“C”的“L”位置坐标系。
图3模型草图
由于“L”的动态显然取决于C的动作,故首先确定其运动方程。为了推导,做出以下假设:
C位于道路的一级。 因此,车轮转向操纵中的负载转移被忽略,前轴和后桥的轮胎各自被减成单轮。 这就形成了普遍的单轨模型[Pacejka (2006)]。
由于在机动过程中没有制动,对此,纵向驾驶行为改变比侧向驾驶行为慢得多,纵向力被忽略和速度假设Vc是恒定的,意味着。
由于只有小的转向角(le;),在回避机动发生期间:侧面滑移角le;,le;)和滑移角(le;,le;),小角度近似相关三角函数是允许的。
④为了描述非线性物理学中的动力学,校准驾驶极限,通过反正切来近似考虑非线性轮胎特性 [Kouml;nig et al. (2007)]。
基于这些假设,微分方程描述“C”的横向驾驶行为可以定义为:
(1)
(2)
这里,i表示转向比,m表示车辆质量,J相对于惯性矩,垂直车辆轴线z位于C,c f1,2 、c r1,2分别是转弯处后轮胎的前部和后轮胎的刚度系数。
为了描述“L”的动力学,和进一步根据和来计算。这是通过考虑偏航率来实现和杠杆臂l x和l y:
(3)
为了根据计算,等式(3)是相对于时间推导出来的:
(4)
由于车辆是刚体,其偏航率是和C和L相同的,并没有被明确的转换。
考虑到C运动方程中的这些变换,状态微分方程:和 包括“L”的动力学:
(5)
(6)
很明显,这些方程与(1)和(2)不同。 由于进一步的横向偏移非线性被添加到模型中。
3.2L的运动学
从图3可以看出,横向偏差sigma;(t)是L和参考点R之间的距离,垂直于“R”中轨迹的切线。
通过图4说明theta;(t)的计算,其中描绘了相关部分的详细视图,模型的草图如图3所示。
由于反馈控制(Delta;kappa;(t)le;5◦),过程角度只有很小的差异,小角度的近似值Sin(Delta;kappa;(t))被应用。结果是,横向偏差计算如下:
(7)
Hahn et al. (2015)认为速度v L(t)可以被取代:
(8)
得到: (9)
要计算状态变量Delta;kappa;(t),基于行程角度对应用于确定“L”中的的微分方程:
(10)
设定行程角速度:
(11)
该微分方程如下:
(12)
这里v L(t)必须由等式(8)代替通过等式(5)可得:
(13)
3.3转向执行器的动态特性
位置控制转向执行器的动态特性,更准确地说,反馈控制器的控制信号的传输行为所得到的方向盘角delta;(t)被近似为具有阻尼系数D,固有角频率和放大K的二阶滞后元件。由此得到两个状态微分方程: (14)
(15)
3.4模型的验证与分析
为了分析衍生植物模型的有效性,驱动不同的高动态开环回避机动。这些实验的分析揭示了状态变量高度依照与相应模拟的结果。因此,可以说模型可用于控制器设计。
此外,给出了被控模型的简短分析。该模型是一个秩序为n = 6的SISO系统,并具有相对度r u = 4。此外,由于它是高度非线性的轮胎特性和动力学和运动学的引导点“L”。由于模型是不随时间变化且是控制仿射,它被分配到以下非线性系统的子集中:
(16)
矢量场包括框架状态微分方程(5),(6),(9),(13),(14)模型通过微分
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141840],资料为PDF文档或Word文档,PDF文档可免费转换为Word

